Generative modeling is the process of learning the underlying structure of a dataset to generate new samples that mimic the distribution of the original data. The article aims to provide a comprehensive overview of generative modelling along with the implementation leveraging the TensorFlow framework.
What are generative models and how do they work?
Generative models aim to learn the probability distribution of data, creating new samples that capture its essence. There are two main ways to define generative models:
Explicit density models
These models explicitly define a probability function for each data point. A Gaussian mixture model, for instance, is an explicit density model that learns the parameters of each Gaussian component and assumes the data is produced by a mixture of Gaussian-distributions. For high-dimensional or you can say complicated data, explicit density models may be computationally expensive or unmanageable, but they may be used to determine the likelihood of every data point.
Implicit density models
These models avoid a defined probability function and instead learn a mapping from a simple latent space to the data space. Generative-Adversarial-Networks (GANs) exemplify this approach, utilizing two networks – a generator and a discriminator – to produce realistic data. Although they create diverse samples calculating the probability of any data point is challenging.
What are the main types of generative models and how are they different?
Generative models are a class of machine learning models that can create new data based on existing data. Different types of generative models have different strengths and weaknesses. Some of the most popular ones are:
Variational Autoencoders (VAEs)
These models compress and decompress data using two neural networks. Additionally, they impose the latent space a straightforward distribution, on the compressed data. In order to get the latent space as near to the simple distribution as feasible and the de-compressed data as similar to the original data as possible, they optimize the model. VAEs may alter and interpolate the latent space in addition to producing smooth and diverse output. However, they may provide distorted/unrealistic data as well as overlook some elements of data distribution.
Generative adversarial networks (GANs)
GANs and other implicit density models (IDMs) employ a game-theoretic approach involving two rival neural networks: a generator that fabricates data in order to deceive a discriminator into believing it to be real. Accurately distinguishing between generated and real data is the discriminator's aim. In order to find a Nash equilibrium, the generator must provide data that the discriminator is unable to distinguish from real data. GANs may learn from incomplete or unlabeled data in addition to being adept at generating accurate and realistic data. They do, however, suffer from mode collapse, where the generator gets stuck producing just a narrow range of data changes, and training instability, where the generator and discriminator's performance fluctuates or diverges.
Autoregressive models (ARMs)
ARMs fall under the category of explicit density models and use a neural network to simulate the conditional probability of each data point while taking the data points that came before it into account. An example of an ARM is a Pixel Recurrent Neural Network (PixelRNN) which creates pictures pixel by pixel by successively anticipating each pixel value based on the ones that came before it. Long-range relationships and complex structures can be captured in the high-quality, diversified data that ARMs can provide. But they might also produce data slowly and in a sequential manner, which could mean they need a lot of computer power and training data.
How to use TensorFlow to build and train generative models?
What if software could create entirely original writings, songs or paintings? Thanks to the field of machine learning called generative modeling this future idea is starting to come true. TensorFlow is an extremely powerful toolkit that you may use to build and train these models on your own ! Use the following essential libraries with TensorFlow to create generative models :
Libraries
| Uses
|
|---|
TensorFlow Probability (TFP)
| Enhances TensorFlow with probabilistic tools for models like VAEs and ARMs.
|
|---|
TensorFlow Generative (TFG)
| Offers implementations of GANs, VAEs, and more for easy experimentation.
|
|---|
TensorFlow Hub (TFH)
| Repository of pre-trained models, aiding in quick integration for specific tasks.
|
|---|
Implementation Steps
- Model Definition: Specify neural network structure and parameters using TensorFlow's built-in or custom layers. TFP and TFG assist in probabilistic or pre-defined models.
- Data Preparation: Load and preprocess data using TensorFlow's data API for tasks like batching and transformations. TFH aids with pre-trained models for data processing.
- Loss and Optimization: Define the loss function and optimizer. TensorFlow provides built-in options, and TFP/TFG support probabilistic alternatives.
- Training and Evaluation: Train using TensorFlow's loops or custom methods. Evaluate using built-in metrics or custom ones. TFP/TFG assist in training probabilistic models or comparing generative models.
How to evaluate and compare generative models?
Evaluating and comparing generative models can be tricky like judging an art competition with no single " best " answer. While there is no perfect way to measure their creations, these methods can help us understand their strengths and weaknesses:
- The eye test (Qualitative Evaluation): Visually examining the generated data is required for this, such as contrasting the model paintings with actual ones. With the use of TensorFlow capabilities we can evaluate aspects like variety , sharpness and realism while displaying and saving these pictures. But this is arbitrary and may over-look some subtleties.
- The numbers game (Quantitative Evaluation): Use the numerical metrics available on tf.keras.metrics and elsewhere. Optionally, use MeanSquaredError() or tf.keras.metrics. Calculate errors and accuracy using the TensorFlow Accuracy() function. using metrics such as Fréchet inception distance, inception score and likelihood. Efficiency and performance are compared using this method. Measures may not adequately capture the true diversity and caliber of generative models if they are selected and applied improperly.
The assessment of generative models ultimately necessitates a harmonious integration of qualitative and quantitative methodologies. We may have a more thorough grasp of these intriguing models and their creative potential by fusing the insights from what the data and our eyes observe.
What are some examples and challenges of generative modeling?
However, generative modeling also faces many challenges and limitations, such as:
Challenge
| Description
|
|---|
Training complexity
| Generative models require significant computational resources and time.
|
|---|
Quality control
| While they can produce vast amounts of data, ensuring the quality and realism of the generated content can be challenging.
|
|---|
Overfitting
| Generative models may learn the data too well and produce outputs that are too similar to the original data or fail to generalize to new data.
|
|---|
Lack of interpretability
| Generative models may not provide a clear explanation of how they generate the data, or what features or patterns they learn from the data.
|
|---|
Ethical concerns
| Generative models may generate data that are harmful, misleading, or malicious, such as fake news, deepfakes, spam, or phishing.
|
|---|
Data dependency
| Generative models may depend on the availability and quality of the data, and may not perform well on data that are scarce, imbalanced, or noisy.
|
|---|
Mode collapse
| Generative models may produce only a few modes of the data distribution, and ignore the rest, resulting in a lack of diversity and variety in the outputs.
|
|---|
Building Basic Autoencoder for Generative Modeling
A generative model that learns to replicate its input into its output is called an autoencoder. It is made up of two components: a decoder that reconstructs the input from the latent representation and an encoder that compresses the input into a latent representation. One may utilize an autoencoder for feature extraction, data compression and dimensionality reduction.
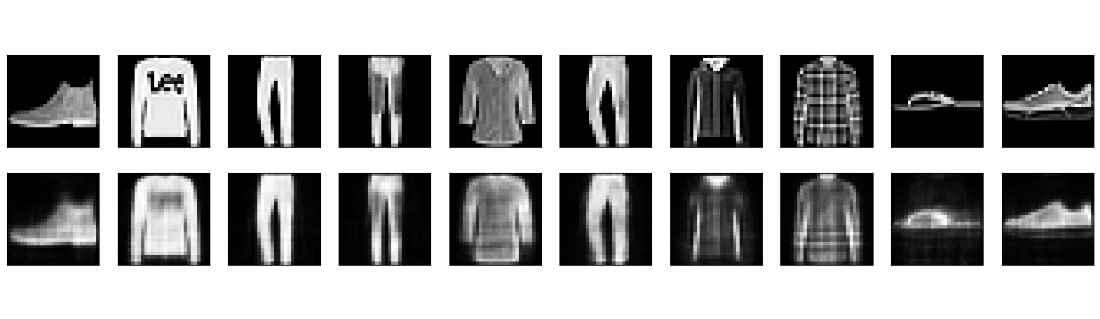
In below example, we'll use a basic autoencoder to compress and decompress the Fashion MNIST dataset which comprises 28x28 grayscale photos of clothes.
Step 1: Add libraries such as TensorFlow.
TensorFlow will be our main framework for developing and optimizing the autoencoder. Among the other tools we'll be utilizing for data processing and visualization are pandas, matplotlib, and numpy.
Python
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
Step 2: Load and prepare the dataset
TensorFlow provides the Fashion MNIST dataset, which we will utilize. The training and testing sets will be loaded and the pixel values will be normalized to the interval [-1, 1]. Since our autoencoder uses a single neuron for the output layer. We will also restructure the pictures to have a single channel.
Python
# Load the dataset
(x_train, _), (x_test, _) = tf.keras.datasets.fashion_mnist.load_data()
# Normalize the pixel values
x_train = x_train.astype('float32') / 255.0 * 2 - 1
x_test = x_test.astype('float32') / 255.0 * 2 - 1
# Reshape the images to have a single channel
x_train = x_train.reshape(x_train.shape[0], 28, 28, 1)
x_test = x_test.reshape(x_test.shape[0], 28, 28, 1)
Step 3: Define the model architecture and parameters
Two thick layers—one for the encoder and one for the decoder—will be used in our straightforward autoencoder. 64 neurons make up the encoder, which maps the input to a 64-dimensional latent space using a sigmoid activation function. In order to map the latent space back to the original picture space of 784 dimensions (28x28 pixels). The decoder will employ a tan h activation function with 784 neurons.
Model definition will be done via the Keras Sequential API and model compilation will be done using an Adam optimizer and a mean squared error loss function.
Python
# Define the model architecture
model = tf.keras.Sequential([
# Encoder layer
tf.keras.layers.Flatten(input_shape=(28, 28, 1)),
tf.keras.layers.Dense(64, activation='sigmoid'),
# Decoder layer
tf.keras.layers.Dense(784, activation='tanh'),
tf.keras.layers.Reshape((28, 28, 1))
])
# Compile the model
model.compile(loss='mse', optimizer='adam')
Step 4: Train and evaluate the model
Using a batch size of 256 and a validation split of 0.2. We will train the model across ten epochs. After every epoch, the model weights will be saved using a callback method. In order to assess the model we will compute the reconstruction error on the test set and display a few of the original and rebuilt photos.
Python
# Define a callback function to save the model weights
class SaveModel(tf.keras.callbacks.Callback):
def on_epoch_end(self, epoch, logs=None):
model.save_weights(f'autoencoder_{epoch+1}.h5')
print(f'Saved model weights for epoch {epoch+1}')
# Train the model
model.fit(x_train, x_train, epochs=10, batch_size=256, validation_split=0.2, callbacks=[SaveModel()])
# Evaluate the model
test_loss = model.evaluate(x_test, x_test)
print(f'Test loss: {test_loss}')
# Visualize some of the original and reconstructed images
n = 10 # Number of images to display
plt.figure(figsize=(20, 4))
for i in range(n):
# Display original image
ax = plt.subplot(2, n, i + 1)
plt.imshow(x_test[i].reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
# Display reconstructed image
ax = plt.subplot(2, n, i + 1 + n)
reconstructed = model.predict(x_test[i].reshape(1, 28, 28, 1))
plt.imshow(reconstructed.reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
plt.show()
Output:
Epoch 1/10
188/188 [==============================] - ETA: 0s - loss: 0.2156Saved model weights for epoch 1
188/188 [==============================] - 4s 16ms/step - loss: 0.2156 - val_loss: 0.1324
Epoch 2/10
186/188 [============================>.] - ETA: 0s - loss: 0.1129Saved model weights for epoch 2
188/188 [==============================] - 3s 18ms/step - loss: 0.1128 - val_loss: 0.0990
Epoch 3/10
185/188 [============================>.] - ETA: 0s - loss: 0.0908Saved model weights for epoch 3
188/188 [==============================] - 3s 15ms/step - loss: 0.0907 - val_loss: 0.0839
.
.
.
Epoch 8/10
185/188 [============================>.] - ETA: 0s - loss: 0.0556Saved model weights for epoch 8
188/188 [==============================] - 2s 13ms/step - loss: 0.0556 - val_loss: 0.0546
Epoch 9/10
185/188 [============================>.] - ETA: 0s - loss: 0.0529Saved model weights for epoch 9
188/188 [==============================] - 3s 14ms/step - loss: 0.0529 - val_loss: 0.0522
Epoch 10/10
187/188 [============================>.] - ETA: 0s - loss: 0.0506Saved model weights for epoch 10
188/188 [==============================] - 3s 16ms/step - loss: 0.0506 - val_loss: 0.0501
313/313 [==============================] - 1s 2ms/step - loss: 0.0501
Test loss: 0.050077132880687714
Building Image denoising
The process of removing noise from a picture, which might include many kinds of such speckle, salt-and-pepper, and Gaussian noise, is known as image denoising. Image denoising can enhance an image clarity and quality or get it ready for other uses, such segmentation or classification.
We will use a neural autoencoder to denoise the same MNIST dataset in this case. The autoencoder will be taught to separate the clean pictures from the noisy ones once the original photographs are exposed to Gaussian noise.
Step 1: Import TensorFlow and other libraries.
Python
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
Step 2: Load and prepare the dataset
Python
# Load the dataset
(x_train, _), (x_test, _) = tf.keras.datasets.fashion_mnist.load_data()
# Normalize the pixel values
x_train = x_train.astype('float32') / 255.0
x_test = x_test.astype('float32') / 255.0
# Reshape the images to have a single channel
x_train = x_train.reshape(x_train.shape[0], 28, 28, 1)
x_test = x_test.reshape(x_test.shape[0], 28, 28, 1)
# Add Gaussian noise to the images
noise_factor = 0.1
x_train_noisy = x_train + noise_factor * np.random.normal(loc=0.0, scale=1.0, size=x_train.shape)
x_test_noisy = x_test + noise_factor * np.random.normal(loc=0.0, scale=1.0, size=x_test.shape)
# Clip the noisy images to the range [0, 1]
x_train_noisy = np.clip(x_train_noisy, 0.0, 1.0)
x_test_noisy = np.clip(x_test_noisy, 0.0, 1.0)
Step 3: Define the model architecture and parameters
Four convolutional layers—two for the encoder and two for the decoder—will be used in our convolutional autoencoder. By using 32 and 16 filters, together with a kernel size of 3 and a stride of 2. The encoder will cut the input's spatial dimensions in half. The input spatial dimensions will be increased by half thanks to the decoder employment of 16 and 1 filters, a kernel size of 3, and a stride of 2. A sigmoid activation function will also be used by the decoder to map the output to the range [0, 1].
Python
# Define the encoder
def encoder(inputs):
# Convolutional layer with 32 filters, 3x3 kernel, and 2x2 stride
x = tf.keras.layers.Conv2D(32, 3, 2, padding='same')(inputs)
# Convolutional layer with 16 filters, 3x3 kernel, and 2x2 stride
x = tf.keras.layers.Conv2D(16, 3, 2, padding='same')(x)
return x
# Define the decoder
def decoder(inputs):
# Convolutional transpose layer with 16 filters, 3x3 kernel, and 2x2 stride
x = tf.keras.layers.Conv2DTranspose(16, 3, 2, padding='same')(inputs)
# Convolutional transpose layer with 1 filter, 3x3 kernel, and 2x2 stride
x = tf.keras.layers.Conv2DTranspose(1, 3, 2, padding='same', activation='sigmoid')(x)
return x
# Define the input layer
inputs = tf.keras.layers.Input(shape=(28, 28, 1))
# Define the model
model = tf.keras.Model(inputs=inputs, outputs=decoder(encoder(inputs)))
# Compile the model
model.compile(loss='mse', optimizer='adam')
Step 4: Train and evaluate the model
Using a batch size of 128 and a validation split of 0.2. We will train the model for 50 epochs. After every epoch, the model weights will be saved using a callback method. In order to assess the model , we will compute the reconstruction error on the test set and visualize a portion of the noisy, original photos that have been denoised.
Python
# Define a callback function to save the model weights
class SaveModel(tf.keras.callbacks.Callback):
def on_epoch_end(self, epoch, logs=None):
model.save_weights(f'denoising_{epoch+1}.h5')
print(f'Saved model weights for epoch {epoch+1}')
# Train the model
model.fit(x_train_noisy, x_train, epochs=50, batch_size=128, validation_split=0.2, callbacks=[SaveModel()])
# Evaluate the model
test_loss = model.evaluate(x_test_noisy, x_test)
print(f'Test loss: {test_loss}')
# Visualize some of the original, noisy, and denoised images
n = 10 # Number of images to display
plt.figure(figsize=(20, 6))
for i in range(n):
# Display original image
ax = plt.subplot(3, n, i + 1)
plt.imshow(x_test[i].reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
# Display noisy image
ax = plt.subplot(3, n, i + 1 + n)
plt.imshow(x_test_noisy[i].reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
# Display denoised image
ax = plt.subplot(3, n, i + 1 + 2 * n)
denoised = model.predict(x_test_noisy[i].reshape(1, 28, 28, 1))
plt.imshow(denoised.reshape(28, 28), cmap='gray')
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
plt.show()
Output:
Epoch 1/50
375/375 [==============================] - ETA: 0s - loss: 0.0316Saved model weights for epoch 1
375/375 [==============================] - 24s 60ms/step - loss: 0.0316 - val_loss: 0.0102
Epoch 2/50
375/375 [==============================] - ETA: 0s - loss: 0.0082Saved model weights for epoch 2
375/375 [==============================] - 16s 43ms/step - loss: 0.0082 - val_loss: 0.0069
Epoch 3/50
374/375 [============================>.] - ETA: 0s - loss: 0.0063Saved model weights for epoch 3
375/375 [==============================] - 13s 34ms/step - loss: 0.0063 - val_loss: 0.0060
.
.
.
Epoch 48/50
375/375 [==============================] - ETA: 0s - loss: 0.0049Saved model weights for epoch 48
375/375 [==============================] - 13s 36ms/step - loss: 0.0049 - val_loss: 0.0049
Epoch 49/50
375/375 [==============================] - ETA: 0s - loss: 0.0049Saved model weights for epoch 49
375/375 [==============================] - 13s 34ms/step - loss: 0.0049 - val_loss: 0.0049
Epoch 50/50
374/375 [============================>.] - ETA: 0s - loss: 0.0049Saved model weights for epoch 50
375/375 [==============================] - 12s 33ms/step - loss: 0.0049 - val_loss: 0.0049
313/313 [==============================] - 2s 5ms/step - loss: 0.0050
Test loss: 0.004958466626703739
.jpg)
Conclusion
We have learnt how to utilize TensorFlow for generative modeling in this article. We have also seen two example code with step by step implementation using TensorFlow for generative modeling. This is just a glimpse into the exciting world of generative modeling with TensorFlow. With practice and exploration, you can use this powerful tool to bring your creative ideas to life from generating futuristic landscapes to composing new musical styles.
Similar Reads
Serving a TensorFlow Model
TensorFlow Serving stands as a versatile and high-performance system tailored for serving machine learning models in production settings. Its primary objective is to simplify the deployment of novel algorithms and experiments while maintaining consistent server architecture and APIs. While it seamle
11 min read
Export a SavedModel in Tensorflow
In TensorFlow, a SavedModel is basically a serialized format for storing a complete TensorFlow program. The tf.saved_model.save() function in TensorFlow can be used to export a SavedModel. A trained model and its related variables are saved to disc in the SavedModel format by this function. It inclu
4 min read
tf.Module in Tensorflow Example
TensorFlow is an open-source library for data science. It provides various tools and APIs. One of the core components of TensorFlow is tf.Module, a class that represents a reusable piece of computation. A tf.Module is an object that encapsulates a set of variables and functions that operate on them.
6 min read
Tensorflow.js tf.model() Function
Tensorflow.js is an open-source library that is developed by Google for running machine learning models as well as deep learning neural networks in the browser or node environment. The tf.model() function is used to create a model which contains layers and layers that are provided in form of input a
2 min read
Python - tensorflow.identity_n()
TensorFlow is open-source Python library designed by Google to develop Machine Learning models and deep learning  neural networks. identity_n() is used get a list of Tensor with same shape and content as input Tensor. Syntax: tensorflow.identity_n( input, name) Parameters: input:  It is a Tensor.na
2 min read
Random number generation using TensorFlow
In the field of Machine Learning, Random numbers generation plays an important role by providing stochasticity essential for model training, initialization, and augmentation. We have TensorFlow, a powerful open-source machine learning library, that contains tf.random module. This module helps us for
6 min read
Tensor Indexing in Tensorflow
In the realm of machine learning and deep learning, tensors are fundamental data structures used to represent numerical data with multiple dimensions. TensorFlow, a powerful numerical computation library, equips you with an intuitive and versatile set of operations for manipulating and accessing dat
10 min read
Load NumPy data in Tensorflow
In this article, we will be looking at the approach to load Numpy data in Tensorflow in the Python programming language. Using tf.data.Dataset.from_tensor_slices() function Under this approach, we are loading a Numpy array with the use of tf.data.Dataset.from_tensor_slices() method, we can get the s
2 min read
Install Tensorflow on Linux
In this article, we are going to see how to install TensorFlow in Linux. It is a completely open-source library for numerical computation using data flow graphs. System requirement:Python 3.6 to 3.8.Pip 19.0 or higher.Ubuntu 16.04 or higher.Step-wise installation: Step 1: Create a virtual environmen
1 min read
Gradient Descent Optimization in Tensorflow
Gradient descent is an optimization algorithm used to find the values of parameters (coefficients) of a function (f) that minimizes a cost function. In other words, gradient descent is an iterative algorithm that helps to find the optimal solution to a given problem.In this blog, we will discuss gra
15+ min read