introduction to Micro Processor and Microcontroller
7 likes482 views

The document provides an introduction to microprocessors and microcontrollers, outlining their architecture, applications, and key differences. It details various Intel microprocessors developed over the years, emphasizing their features, registers, and instruction sets. The text also highlights the distinction between microprocessors and microcontrollers in terms of functionality and integration.





























































introduction to Micro Processor and Microcontroller
- 1. Introduction To Microprocessor and Microcontroller 1 By V.Bharathi M.E.,M.B.A.,(Ph.D) Asst.Prof -ECE Kongunadu College of Engg & Tech,Thottiam,Trichy
- 2. Objective Introduction to microprocessor Applications of microprocessor Architecture Addressing mode and its types Instruction Set Peripherals in MP and MC Difference Between MP and MC Videos 6 August 20172
- 3. Introduction 6 August 20173 Microprocessor (µP) is the “brain” of a computer that has been implemented on one semiconductor chip. Processor means a device that processes whatever(binary numbers, 0’s and 1’s) To process means to manipulate. It describes all manipulation. Micro-> extremely small
- 4. Definition of a Microprocessor. 6 August 20174 A microprocessor is multi programmable clock driven register based semiconductor device that is used to fetch , process &execute a data within fraction of seconds .
- 5. Applications 6 August 20175 Calculators Accounting system Games machine Traffic light Control Multi user, multi-function environments Military applications Communication systems
- 8. Advanced safety vehicle (ASV) 6August2017 8
- 10. Development of Intel Microprocessors 8086 -1979 286 -1982 386 -1985 486 -1989 Pentium -1993 Pentium Pro -1995 Pentium MMX -1997 Pentium II -1997 6 August 201710
- 11. Development of Intel Microprocessors Pentium II Celeron -1998 Pentium II Zeon -1998 Pentium III -1999 Pentium III Zeon -1999 Pentium IV -2000 Pentium IV Zeon -2001 6 August 201711
- 12. 8-bit Microprocessors Introduced in 1972. It was first 8-bit μP. Its clock speed was 500 KHz. Could execute 50,000 instructions per second 6 August 201712
- 13. Intel 8080 Introduced in 1974. It was also 8-bit μP. Its clock speed was 2 MHz. It had 6,000 transistors 6 August 201713
- 14. Intel 8085 Introduced in 1976. It was also 8-bit μP. Its clock speed was 3 MHz. Its data bus is 8-bit and address bus is 16-bit. It had 6,500 transistors. Could execute 7,69,230 instructions per second. It could access 64 KB of memory. It had 246 instructions 6 August 201714
- 15. 16-bit Microprocessors 6 August 201715
- 16. Introduction to INTEL8086 Features of 8086 Introduced in 1978. It was first 16-bit μP. Its clock speed is 4.77 MHz, 8 MHz and 10 MHz, depending on the version. Its data bus is 16-bit and address bus is 20-bit. It had 29,000 transistors. Could execute 2.5 million instructions per second. It could access 1 MB of memory. It had 22,000 instructions. 6 August 201716
- 17. Basic Microprocessors System 6 August 201717
- 18. Clock pulse 6 August 201718
- 19. BUS CONCEPT BUS: Group of conducting lines that carries data , address & control signals. CLASSIFICATION OF BUSES: DATA BUS: group of conducting lines that carries data. ADDRESS BUS: group of conducting lines that carries address. CONTROL BUS: group of conducting lines that carries control signals {RD,WR etc} CPU BUS: group of conducting lines that directly connected to μP SYSTEM BUS: Group of conducting lines that carries data , address & control signals in a μP system. 6 August 2017
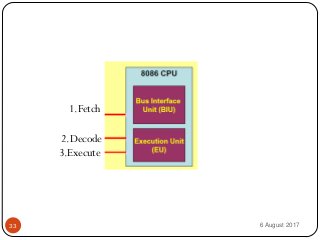
- 20. 8086 Internal Architecture 6 August 201720 1.Fetch 2.Decode 3.Execute
- 21. Registers organization 0f 8086 8086 has powerful set of registers, It includes 1. General purpose Register. 2. Segment Register. 3. Flag Register. 4.Pointer and Index Register. 6 August 201721
- 22. General purpose register All the general registers of the 8086 microprocessor can be used for arithmetic and logical operations.The 16 – bit general registers are 1.Accumulator(AX) = (AL,AH) 2.Base Register(BX) = (BL,BH) 3.Count Register(CX) = (CL,CH) 4. Data Register (DX) = (DL,DH) 6 August 201722 All registers can be used as 16 bit registers or two 8- bit registers
- 23. General Purpose Registers 6 August 201723 15 8 7 0
- 24. General Purpose Registers 6 August 201724
- 25. 6 August 201725 AX is used as 16 bit Accumulator(ACC) Where as register AL is used as 8 bit Accumulator(ACC) They can also used as counters or used for storing off set address.
- 26. Segment Registers 6 August 201726
- 28. Flag Registers 6 August 201728
- 29. Architecture of 8086 6 August 201729
- 30. Architecture of 8086 Architecture is internally divided into two separate functional units. 1. Bus interface unit (BIU) 2. Execution unit (EU) These two functional units can work simultaneously to increase the system speed Throughput- is a measure of number of instructions executed per unit time 6 August 201730
- 31. Functions of Bus interface unit (BIU) Sends out addresses for memory locations Fetches Instructions from memory Reads/Writes data to memory Sends out addresses for I/O ports Reads/Writes data to Input/output ports Supports for instructions queuing Provides the address relocation facility 6 August 201731
- 32. Instruction queue To speed up the program execution, the BIU unit fetches six instruction bytes ahead of time from the memory These prefetced instruction bytes are held for the execution unit in a group of six registers. With the help of the queue it is possible to fetch next instruction when current instruction is in execution BIU fetches next instruction when previous instruction is in execution <Refer next slide> 6 August 201732
- 34. Execution Unit The execution unit of 8086 tells the BIU from where to fetch instructions or data, decodes instruction and execute instructions. It contains 1. Control Circuitry 2. Instruction decoder 3.Arithmetic Logic Unit (ALU) 4. Flag register 5. General purpose registers 6. Pointers and instruction registers 6 August 201734
- 35. Pointer Register Stack Pointer (SP) It is a 16- bit register pointing to program stack Base Pointer (BP) It is a 16 bit register pointing to data in the stack segment. BP register is usually used for base index or register indirect addressing mode 6 August 201735
- 36. Index register Source Index(SI) It is a 16 bit register .SI is used for indexed ,based indexed and register indirect addressing mode • Destination Index(DI) It is a 16 bit register, DI is used for indexed ,based indexed and register indirect addressing mode 6 August 201736
- 37. SUBROUTINE & SUBROUTINE HANDILING INSTRUCTIONS 6 August 201737
- 38. 6 August 201738
- 39. INTERRUPTS &INTERRUPT SERVICE ROUTINE(ISR) INTERRUPT & ISR ? ‘Interrupts’ is to break the sequence of operation. While the CPU is executing a program, on‘interrupt’ breaks the normal sequence of execution of instructions, diverts its execution to some other program called Interrupt Service Routine (ISR) 6 August 201739
- 40. 6 August 201740
- 41. 6 August 201741
- 42. 6 August 201742
- 43. Maskable Interrupt: An Interrupt that can be disabled or ignored by the instructions of CPU are called as Maskable Interrupt. Non-Maskable Interrupt: An interrupt that cannot be disabled or ignored by the instructions of CPU are called as Non-Maskable Interrupt. Software interrupts are machine instructions that amount to a call to the designated interrupt subroutine, usually identified by interrupt number. Ex: INT0 -INT255 6 August 201743
- 44. 6 August 201744
- 45. 6 August 201745
- 46. Setup & Hold Time 6 August 201746
- 47. Setup time The time before the rising edge of the clock, while the data must be valid and constant Hold time The time after the rising edge of the clock during which the data must remain valid and constant 6 August 201747
- 48. MICRO CONTROLLER An IC which process and also controls the devices such as Keyboard Speaker Display 6 August 201748
- 49. PHERIPERALS IN 8086 6 August 201749
- 50. I/O PORTS I/O Ports Is Used For Input /Output Data Communication 6 August 201750
- 51. 6 August 201751
- 52. INTERRUPT Disturbing main function is called interrupt 6 August 201752
- 53. 6 August 201753
- 54. FLAG 6 August 201754 Intimation of work completed
- 55. 6 August 201755
- 56. ANALOG TO DIGITAL CONVERSION 6 August 201756
- 57. 6 August 201757
- 58. TIMER /COUNTER 6 August 201758
- 59. Difference between MP & MC Microprocessor Microcontroller CPU is stand-alone, RAM, ROM, I/O, timer are separate Designer can decide on the amount of ROM, RAM and I/O ports Expansive General-purpose Multitasking CPU, RAM, ROM, I/O and timer are all on a single chip Fix amount of on-chip ROM, RAM, I/O ports Not Expansive Special Purpose Single Task at a time 6 August 201759
- 61. Recap MP-Microprocessor MC-Microcontroller SI-Source Index DI-Destination Index SP-Stack Pointer Mov-Move Data Add – Add the data 6 August 201761
- 62. Thank you 6 August 201762