Object detection technique using bounding box algorithm for
2 likes3,772 views

This document describes an object detection technique using bounding box algorithms for robot navigation. It involves using a webcam and Arduino microcontroller to capture images and detect the centroid of colored objects. MATLAB is used to analyze the images and detect centroid movement between frames. The centroid movement data is sent to the Arduino to control the robot's movement and avoid obstacles for applications in robot vision, surveillance, and traffic monitoring.

![REFERENCES
[1] http://www.mathworks.in/help/images/ref/regionprops.html
[2] http://arduino.cc/en/Tutorial/HomePage
[3]http://nf.nci.org.au/facilities/software/Matlab/toolbox/images/region
props.html
[4] Gesture Controlled Robot using Image Processing,Harish Kumar
Kaura, Vipul Honrao, Sayali Patil, Pravish Shetty, (IJARAI) International
Journal of Advanced Research in Artificial Intelligence, Vol. 2, No. 5, 2013](https://image.slidesharecdn.com/objectdetectiontechniqueusingboundingboxalgorithmfor-141111023049-conversion-gate02/85/Object-detection-technique-using-bounding-box-algorithm-for-12-320.jpg)
Object detection technique using bounding box algorithm for
- 1. Object Detection Technique using Bounding Box Algorithm for Robot Navigation Submitted by: 1.Akshay Chidrawar (11) 2.Vaibhav Khedkar (34) 3.Ajay Patkar (56) 4.Vishal Thakur (71) Guided By: Mr.Shailesh Nandgaonkar
- 2. CONTENTS Introduction Block Diagram Hardware Tool SoftwareTool Algorithm Application References
- 3. INTRODUCTION In today’s age, the robotic industry has been developing many new trends to increase the efficiency, accessibility and accuracy of the systems. Basic tasks could be jobs that are harmful to the human, repetitive jobs that are boring, stressful etc. Robots can be wired or wireless, both having a controller device. Many systems exist that are used for controlling the robot through gestures involve adaptive colour segmentation , hand finding and labelling with blocking, morphological filtering. Not very cost effective.
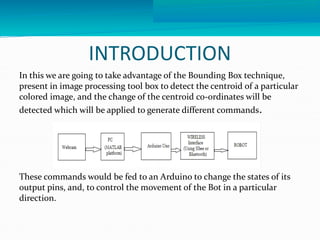
- 4. INTRODUCTION In this we are going to take advantage of the Bounding Box technique, present in image processing tool box to detect the centroid of a particular colored image, and the change of the centroid co-ordinates will be detected which will be applied to generate different commands. These commands would be fed to an Arduino to change the states of its output pins, and, to control the movement of the Bot in a particular direction.
- 5. HARDWARE TOOL 1.Webcam: 2.Arduino ATmega328:
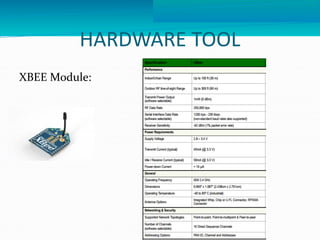
- 6. HARDWARE TOOL XBEE Module:
- 7. SOFTWARE TOOL 1.MATLAB 2.Arduino Programming 3.XCTU for XBEE
- 8. ALGORITHM Movement detection using MATLAB: Image acquisition is a crucial part for movement detection. To get the detail of the hardware device interfaced for imaging imaqhwinfo command is used.Snapshots are taken using imaging device and Bounding Box algorithm is applied on captured images. 1. Grab an image using Image Acquisition toolbox. 2.Run image grabbing function inside a loop( while loop is advised). 3.From the required color index, perform image subtracting function. 4.Apply median filter for noise cancelation and convert the image into black and white image. 5.Calculate the ‘regionprops’ of each of the component of the image.
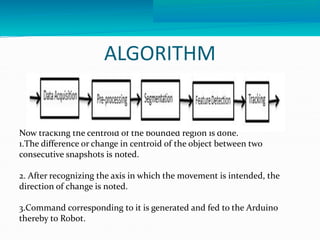
- 9. ALGORITHM Now tracking the centroid of the bounded region is done. 1.The difference or change in centroid of the object between two consecutive snapshots is noted. 2. After recognizing the axis in which the movement is intended, the direction of change is noted. 3.Command corresponding to it is generated and fed to the Arduino thereby to Robot.
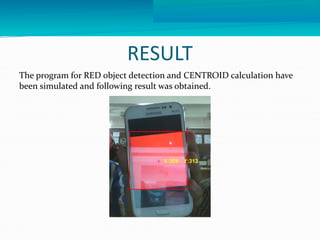
- 10. RESULT The program for RED object detection and CENTROID calculation have been simulated and following result was obtained.
- 11. APPLICATION 1.Robot Vision: In robot navigation, the steering system needs to identify different obstacles in the path to avoid collision. 2.Automated Video Surveillieance: In these applications computer vision systems is designed to monitor the movements in an area, identify the moving objects and report any doubtful situation . 3.Traffic Monitoring
- 12. REFERENCES [1] http://www.mathworks.in/help/images/ref/regionprops.html [2] http://arduino.cc/en/Tutorial/HomePage [3]http://nf.nci.org.au/facilities/software/Matlab/toolbox/images/region props.html [4] Gesture Controlled Robot using Image Processing,Harish Kumar Kaura, Vipul Honrao, Sayali Patil, Pravish Shetty, (IJARAI) International Journal of Advanced Research in Artificial Intelligence, Vol. 2, No. 5, 2013