











![ This unit accepts control signals ( RD’, WR’ ) and also inputs from address(A1, A0)
bus and issues commands to control blocks .
It has the following pins.
CS’ , RD’ , WR’ , RESET , A1 , A0
RESET : The 8255 is placed into its reset state if this input line is a logical 1
This is a tristate bidirectional buffer used to interface 8255 to microprocessor system
data bus.
Data is transmitted or received by the buffer on execution of input or output
instruction by the microprocessor.
1. Data bus buffer
2. Read/Write control logic
These block receive control from the microprocessor and issues commands to their
respective ports.
2 groups of control blocks are present
Group A [Port-A (PA) & Port C Upper PCU(PC7 –PC4)]
consist of port A and port C upper.
Group B [Port-B (PB )& Port C Lower PCL ( PC3 –PC0)]
consists of port C lower and port B
3. Control block](https://image.slidesharecdn.com/unit3stu-250515105007-ba406635/85/8086-microprocessor-Input-Output-INTERFACING-14-320.jpg)




































































8086 microprocessor -Input/Output INTERFACING
- 2. Memory Interfacing and I/O interfacing - Parallel communication interface – Serial communication interface 8/I;– D/A and A/D Interface – Interrupt controller – Programming and applications Case studies: Traffic Light control, LED display and LCD display. CO- Explain how peripherals (8255, 8253, etc.) are interconnected with the microprocessor
- 4. . Input port : used to read the data from key board Tri state buffer is used as the Input port. Its output is available only when its enable line is active Output port : send the data to the printer or display Latches are used as the Output port Output is available only when its enable line is active Several memory chips(ROM, RAM) or I/O devices (key board, display, printer) are connected to a microprocessor. An address decoding circuit(decoder/demultiplexer) is used to select the required I/O device or a memory chip. transfer of data between I/O devices and the microprocessor is called as I/O data transfer This data transfer takes place through I/O port Components used for Memory or I/O interfacing are decoder/demultiplexer, tri-state buffer, latches I/O Interfacing
- 5. Steps in Interfacing an I/O Device The following steps are performed to interface a general I/O device with a CPU: 1. Connect the data bus of the microprocessor system with the data bus of the I/O port. 2. Derive a device address pulse by decoding the required address of the device and use it as the chip select of the device. 3. Use a suitable control signal, IORD and/or IOWR to carry out device operations, i.e. connect IORD to RD input of the device if it is an input devise, otherwise connect IOWR to WR input of the device. In some cases the RD or WR control signals are combined with the device address pulse to generate the device select pulse.
- 7. Memory organization in 8086 BHE and Ao are used for decoding the required chip select signals for the odd and even memory banks
- 8. Memory and I/o devices are interfaced with the micro processor in two ways 1. Memory mapped I/O 2. I/O mapped I/O When = 1, memory operation takes place = 0, I/O operation takes place
- 10. Parallel communication interface 8255 is a programmable peripheral interface(PPI) device designed to interface the microprocessor with its outside world such as ADC, DAC, keyboard etc. It can be programmed to transfer data under various conditions INTEL 8255- programmable peripheral interface(PPI)
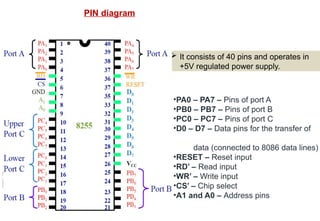
- 11. •PA0 – PA7 – Pins of port A •PB0 – PB7 – Pins of port B •PC0 – PC7 – Pins of port C •D0 – D7 – Data pins for the transfer of data (connected to 8086 data lines) •RESET – Reset input •RD’ – Read input •WR’ – Write input •CS’ – Chip select •A1 and A0 – Address pins It consists of 40 pins and operates in +5V regulated power supply. PIN diagram
- 12. It consists of three 8-bit bidirectional I/O ports( 24 lines) through which the input, output devices are connected. 1. PORT A 2. PORT B 3. PORT C. Port C is further divided into two 4-bit ports i.e. port C lower and port C upper and port C I/O ports Each port has unique address and data to read/write The pins A0, A1 will select the ports which is to be connected to the D0 to D7 CS’ – Chip select lines used to select the 8255, since multiple 8255 are connected When CS’ =0, that particular 8255 is selected Selection of port(commands to control blocks) When A0, A1=00, port A is selected =01 , port B is selected =10 , port C is selected =11, control register is selected for programming As soon as we connect 8255, we can program using control register
- 13. Internal Block diagram of 8255
- 14. This unit accepts control signals ( RD’, WR’ ) and also inputs from address(A1, A0) bus and issues commands to control blocks . It has the following pins. CS’ , RD’ , WR’ , RESET , A1 , A0 RESET : The 8255 is placed into its reset state if this input line is a logical 1 This is a tristate bidirectional buffer used to interface 8255 to microprocessor system data bus. Data is transmitted or received by the buffer on execution of input or output instruction by the microprocessor. 1. Data bus buffer 2. Read/Write control logic These block receive control from the microprocessor and issues commands to their respective ports. 2 groups of control blocks are present Group A [Port-A (PA) & Port C Upper PCU(PC7 –PC4)] consist of port A and port C upper. Group B [Port-B (PB )& Port C Lower PCL ( PC3 –PC0)] consists of port C lower and port B 3. Control block
- 15. Modes of operation of 8255 1. Bit set/Reset (BSR) mode The BSR mode is used to set or reset the bits in port C. 2. I/O mode. The I/O mode is further divided into 3 modes: (i) mode 0 : all ports function as simple Input/output Each of the port will work independently. Port A, Port B can be configured as simple 8 bit Input/output port without handshaking. Two halves of Port C together work as 8 bit port or Port C as two 4-bit ports (ii) mode 1 I/O with handshake Group A consist of port A (8 bit) and upper half of port C (4 bit) and Group B consist of port A (8 bit) and lower half of port C (4 bit) port A and port B can be programmed as 8 bit input or output ports with 4 lines of port C in each group is used for handshaking (iii) mode 2 Bidirectional data transfer Only port A can be used as bidirectional port. Handshaking signals are provided on five lines of port C(PC3 –PC7) Two primary modes
- 16. 8255 has 8 bit control register 8255 ports can be configured for operation by writing appropriate control word When A0, A1=11, control register is used for programming by setting the control word control register control word format For parallel I/O When D7=1, the word loaded into the control register is a mode definition word D7=0, it is taken as a bit set or reset word Appropriate words are set or reset depends on the type of operation desired, and loaded into the control register Control words defines the complete function of PPI. They are loaded before any transmission or reception
- 17. For BSR mode S/R = 1 for set =0 for reset Depending upon the value if CS’, A1 and A0 we can select different ports in different modes as input-output function or BSR. This is done by writing a suitable word in control register (control word D0-D7).
- 21. Basics of serial communication Transmitter: - A parallel-in, serial-out shift register Receiver: - A serial-in, parallel-out shift register. In parallel transmission, number of data lines depends on number of bits to be transmitted For long distance communication, parallel transmission is impractical(increase in cost)
- 22. a) Simplex mode Data is transmitted only in one direction over a single communication channel. example, the processor may transmit data for a CRT display unit in this mode. b) Duplex Mode data may be transferred between two transreceivers in both directions simultaneously. c) Half Duplex mode data transmission may take place in either direction, but at a time data may be transmitted only in one direction. A computer may communicate with a terminal in this mode. It is not possible to transmit data from the computer to the terminal and terminal to computer simultaneously. Basic Modes of serial data transmission a) Simplex b) Duplex c) Half Duplex
- 23. Serial communication interface -8251 INTEL 8251 -USART - UNIVERSAL SYNCHRONOUS ASYNCHRONOUS RECEIVER TRANSMITTER (USART) Programmable chip designed for synchronous and asynchronous serial data transmission 28 pin DIP Coverts the parallel data into a serial stream of bits suitable for serial transmission. Receives a serial stream of bits and convert it into parallel data bytes to be read by a microprocessor.
- 24. PIN diagram
- 25. Internal Block diagram of 8251 Internal architecture consists of Five Sections Read/Write Control Logic Transmitter Sections Receiver Sections Data Bus Buffer- 8 bit Bidirectional bus. Modem Controller
- 26. 1. Read/Write Control Logic Interfaces the chip with MPU Determine the functions according to the control word Monitors data flow – Chip Select When this signal goes low, 8251 is selected by microprocessor unit(MPU) for communication – Control/Data When this signal is high, the control register or status register is addressed When it is low, the data buffer is addressed Control and Status register is differentiated by and signals, respectively – Write writes in the control register or sends outputs the data to the data buffer. This connected to IOW or MEMW – Read Either reads a status from status register or accepts data from the data buffer This is connected to either IOR or MEMR CLK - Clock Connected to system clock Necessary for communication with microprocessor. clock Frequency is 30 times greater than data rate of Tx.
- 27. control Register-16 bit register Accessed as an output port when =1 status register- Checks the status of a peripheral RESET = 1, forces 8251 is in ideal mode. It remain in the ideal mode until a new set of control word is written into 8251 to program its functions (Control/Data) signal along with read() and write () signal inform 8251, the data on the data bus is either a data , control word or status information
- 28. Converts parallel data received from microprocessr unit(MPU) into serial data 2. Transmitter It consists of Transmitter buffer and transmit control It has two registers 1. Buffer Register : To hold eight bits of data 2. Output Register : Converts eight bits into a stream of serial bits Transmits data on TxD pin with appropriate framing bits(Start and Stop) TxD – Transmit Data Serial bits are transmitted on this line – Transmitter Clock Controls the rate at which bits are transmitted TxRDY – Transmitter Ready Can be used either to interrupt the MPU or indicate the status It goes high when the USART is ready to accept data and its buffer register is empty TxEMPTY – Transmitter Empty Logic 1 on this line indicate that the output register is empty Signals in Transmitter Section
- 29. Receives serial bits from peripheral(I/O or memory) Converts serial bits into parallel word(data) Transfers the parallel word to the MPU 3. Receiver The section has two registers Input Register Buffer Register RxD – Receive Data Bits are received serially on this line and converted into parallel byte in the receiver input – Receiver Clock Controls the rate at which bits are transmitted RxRDY – Receiver Ready It goes high when the USART has a character in the buffer register and is ready to transfer it to the MPU Signals Associated with Receiver Section
- 30. Used to establish data communication modems over telephone line Used to convert digital signals from these devices into analog signals that can be transmitted over telephone lines or cable networks. 4. Modem Controller - Data Set Ready Normally used to check modem condition if the Data Set is ready when communicating with a modem - – Data Terminal Ready This output signal is used to tell modem that Data Terminal is ready. – Request to send Data This output signal is asserted to begin transmission. the receiver is ready to receive a data byte from modem – Clear to Send A low on this input enables the 8251A to transmit serial data if the TxE bit in the command byte is set to a “one”. Signals Associated with Modem Control This is a tristate bidirectional buffer used to interface 8251 to microprocessor system data bus. Data is transmitted or received by the buffer on execution of input or output instruction by the microprocessor. 5. Data bus buffer
- 31. Control words Control words defines the complete function of UASRT. They are loaded before any transmission or reception Control word is split into two 1. Mode instruction 2. Command instruction 1. Mode instruction Th
- 32. 2. Command instruction After the mode instruction, command instruction should be issued to the USART. It controls the operation of the USART within the basic frame work established by the mode instruction
- 33. Status Word n the data communication systems it is often necessary to examine the “status” of the transmitter and receiver. It is also necessary for CPU to know if any error has occurred during communication.
- 34. (i) Asynchronous Mode (Transmission) –MPU to perpheral Two modes of operation 1. Synchronous mode 2. Asynchronous Mode modes of operation MPU adds START bits prior to the serial data bits, followed by parity bit(optional) and STOP bits This sequence is transmitted using TxD(transmit data) output pin to a peripheral when ( Transmitter clock- control the rate at which the data is transmitted) is low Asynchronous Mode (Receive) – perpheral to MPU A low on RxD (Receive data) input line indicate a START bit . Following the START bit, the data, STOP bits are received in input register Then it is transferred to the buffer as parallel data The RxRDY ( Receiver Ready) pin becomes high when the USART has a character in the buffer register and is ready to transfer it to the MPU
- 35. (ii) Synchronous Mode (Transmission) –MPU to perpheral The TxD output pin is high until the MPU sends character to USART When (CTS)’(clear to send) line goes low, the first character(a SYNC character) is serially transmitted from UASRT during the falling edge of (TxC)’. Data is shifted out at the same rate as (TxC)’ , over TxD output line If the CPU buffer becomes empty, the SYNC character or characters are inserted in the data stream over TxD output. Synchronous Mode (Receiver) synchronization can be achieved internally or externally. The data on RxD pin is sampled on rising edge of the RxC. content of the receiver buffer is compared with the first SYNC character at every edge until it matches When the characters match, the hunting stops. The SYNDET pin set high and is reset automatically by a status read operation.
- 37. A/D Interface - ADC 0808/0809 The analog to digital converter chips 0808 and 0809 are 8-bit CMOS, successive approximation converters. conversion time. - the time taken to produce a valid output binary code for an applied input voltage. When we refer to a converter as high speed, it has a short conversion time.
- 38. Features conversion delay is 100 µs at a clock frequency of 640 kHz do not need any external zero or full scale adjustments have a 3:8 analog multiplexer(at a time eight different analog inputs can be connected ) Out of these eight inputs only one can be selected for conversion by using address lines ADD A, ADD B and ADD C, PIN diagram
- 39. operation ADC has 8 input channels , 3 bit address line (A, B, C) is used to select the desired input channel The address must be latched for at least 50ns using Address latch enable (ALE) signal After 2.5 s , the Start Of Conversion(SOC) signal must be send high then low to start conversion process. End of conversion is indicated by End Of Conversion(EOC) signal Microprocessor can read the digital word by enabling the output enable signal. Timing diagram
- 40. Interfacing the ADC ADC is interfaced with 8086 through 8255 Programmable Peripheral Interface chip PortA of 8255 chip is used as the input port. (Port B, Port C can be used) PC7 pin of PortCupper is connected to the (EOC) Pin of the A/D converter. The portClower is used as output port. (Port A, Port B can be used) The PC0-PC2 lines are connected to three address pins(A, B,C) of 0808 to select input channels. The PC3 pin is connected to the Start of Conversion (SOC) pin and ALE pin of ADC 0808/0809.
- 41. MVI A, 98H ; Set Port A and Cupper as input, CLower as output OUT 03H ; Write control word 8255-I to control Wordregister XRA A ; Clear the accumulator OUT 02H ; Send the content of Acc to Port Clower to select IN0 MVI A, 08H ; Load the accumulator with 08H OUT 02H ; ALE and SOC will be 0 XRA A ; Clear the accumulator OUT 02H ; ALE and SOC will be low. READ: IN 02H ; Read from EOC (PC7) RAL ; Rotate left to check C7 is 1. JNC READ ; If C7 is not 1, go to READ IN 00H ; Read digital output of ADC STA 8000H ; Save result at 8000H HLT ; Stop the program •Port A: Used to transfer the ADC's digital data output to the MPU •Port C: Used for control signals program
- 42. D/A Interface - DAC 0800 D/A converter converts the digital signal into analog signal Several techniques are employed for digital to analog conversion. i. Weighted resistor network ii. R-2R ladder network iii. Current output D/A converter 1. Resolution: It is a change in analog output for one LSB change in digital input. the smallest increment of output that the DAC can produce for LSB change Resolution for n bit digital input is =(1/2n )*Vref. Vref = reference voltage eg. n=8 (i.e.8-bit DAC), Vref =5V’ then, resolution = 1/256*5V=39.06mV 2. Settling time: It is the time required for the DAC to settle from its initial output to steady state output(final value) Characteristics:
- 43. DAC require a reference analog voltage (Vref) or current (Iref) source. DAC0800 is available as a 16-pin IC in DIP DAC is an 8-bit, high speed, current output with settling time (conversion time) of 100 ns. It produces complementary current output, which can be converted to voltage by using simple resistor load. DAC require a positive and a negative supply voltage in the range of ± 5V to ±18V. Resolution of the DAC is 39.06mV Features: PIN diagram
- 44. Interfacing the DAC DAC is interfaced with 8086 through 8255 Programmable Peripheral Interface chip PortA of 8255 chip is used as the input port. (Port B, Port C can be used)-Digital Input MVI A, DATA ; Load 8-bit data to be sent at the input of 0808 DAC OUT 00 ; Send data on port A. input words.
- 45. Keyboard/Display Controller -INTEL 8279 8279 simultaneously drives the display of a system and interfaces a Keyboard with the microprocessor 8279 provides two interfaces: keyboard interface and Display interface 8279 has two modes of operation: Input(keyboard) mode and output(Display) mode 1. Keyboard interface It scans the Keyboard to identify if any key has been pressed and sends the code of the pressed key to the microprocessor 8279 transmits the data received from the microprocessor, to the display device. 2. Display interface 8279 provides 1. A set of four scan lines and eight return lines for interfacing keyboards. 2. A set of eight output lines for interfacing display.
- 46. PIN diagram •A0: Selects data (0) or control/status (1) for reads and writes between micro and 8279. •BD: Output that blanks the displays. •CLK: Used internally for timing. Max is 3 MHz. •CNTL/STB: Control/strobe, connected to the control key on the keyboard. •CS: Chip select that enables programming, reading th keyboard, etc. •DB7-DB0: Consists of bidirectional pins that connect to data bus on micro. •IRQ: Interrupt request, becomes 1 when a key is pressed, data is available. •OUT A3-A0/B3-B0: Outputs that sends data to the most significant/least significant nibble of display. •RD(WR): Connects to 8086's IORC or RD signal, reads data/status registers. •RESET: Connects to system RESET. •RL7-RL0: Return lines are inputs used to sense key depression in the keyboard matrix. •Shift: Shift connects to Shift key on keyboard. •SL3-SL0: Scan line outputs scan both the keyboard and displays.
- 47. Internal Block diagram of 8279 1. Keyboard sections 2. Display session 3. Scan session 4. Microprocessor interface and control section 4 sessions
- 48. The 8 return lines (RL7 — RL0) are buffered and latched by the return buffers during each row scan in scanned keyboard or sensor matrix mode In strobed input mode, the contents of the return lines are transferred to the FIFO RAM on the rising edge of the shift and control/strobe (CNTL/STB) line pulse. 1. Keyboard sections Return Buffers Keyboard Debounce and Control FIFO/Sensor RAM FIFO/Sensor RAM and Status Logic This section consists of Return Buffers: Keyboard Debounce and Control: This section is enabled only during scanned key board mode return lines are scanned, looking for key closures in that row. If it detects a closed switch, the Keyboard debounce unit waits for 10 ms. After the debounce period(10 ms), if the key continues to be detected, code of the Key is directly transferred to the FIFO sensor RAM along with SHIFT and CONTROL key status
- 49. Two key depressions modes in keyboard section 2-key lockout N-key rollover. 2-key lockout mode If two keys are pressed simultaneously, only the first key is recognized. N-key rollover mode simultaneous keys are recognized and their codes are stored in FIFO. . FIFO RAM status keeps track of the number of characters in the FIFO and whether it is full or empty. Interrupt request (IRQ) signal is high when the FIFO is not empty, FIFO/Sensor RAM: This is a dual function 8 x 8 RAM. In scanned keyboard and strobed input modes, it is a FIFO. Each new entry is written into successive RAM positions and then read in order of entry. In sensor matrix mode, the memory is a sensor RAM. Each row of the sensor RAM is loaded with the status of the corresponding row of sensor in the sensor matrix FIFO/sensor RAM status:
- 50. 2. Display section Display RAM Display register Display address register This section consists of Display RAM holds the 1.address of the byte currently being written or read by the microprocessor 2. scan count value. The display section consists of 16 x 8 display RAM. The microprocessor read from or write into any location of the display RAM. In decoded mode, 8279 uses first four locations of display RAM. In encoded mode, 8279 uses first eight locations for 8 digit display and all 16 locations for 16 digits display Display address register Display registers are two 4-bit registers A(A0-A3) and B(B0-B3). They hold the bit pattern of character to be displayed. The contents of display registers A and B can be blanked and inhibited individually. Display register
- 51. In decoded scan mode, the output of scan lines will be similar to a 2-to-4 decoder. In encoded scan mode, the output of scan lines will be binary count, and so an external decoder should be used to convert the binary count to decoded output lines(SC3 — SC0). The scan lines are common for keyboard and display. 3.Scan section scan counter has two modes Encoded mode and decoded mode. The scan section has a scan counter and four scan lines, SL0 to SL3. 4. Microprocessor unit(MPU) interface section The MPU interface section takes care of data transfer between 8279 and the processor consists of data buffers, I/O control, control and timing registers, and timing and control logic. Data Buffers 8-bit bi-directional data lines DB0 to DB7 for data transfer between 8279 and 8086.
- 52. Control signal A0, , , are used for read/write operation in 8279. When A0 = 0, data is transferred A0 =1 command word or status word is transferred. , determine the direction of data flow through the data buffers. I/O control store the keyboard and display modes and other operating conditions programmed by the 8086 when A0 = 1 . Control and Timing Registers: The timing control consists of the basic timing counter chain. The first counter is divided by N prescaler that can be programmed to give an internal frequency of 100 kHz. Timing Control:
- 53. Three input modes for keyboard interface Scanned keyboard mode Scanned sensor matrix mode Strobed input mode 1. Keyboard interface mode Operating Modes of 8279 1. Keyboard interface (input) modes 2. Display(output) modes Scanned keyboard mode In this mode, matrix to be interfaced in two ways : Encoded scan and decoded scan In the encoded scan, an 8 x 8 keyboard or in decoded scan , a 4 x 8 Keyboard can be interfaced. The code of key pressed with SHIFT and CONTROL status is stored into the FIFO RAM.
- 54. Two output modes for keyboard interface Left Entry(typewriter type) Right Entry(calculator type) 2. Display interface mode Displays the characters from left to right Address 0 in the RAM is the left-most display character and address 7 is the right most display character Left Entry mode Scanned sensor matrix mode In this mode, a sensor array can be interfaced with 8279 using either encoder or decoder scans. With encoder scan 8 x 8 sensor matrix or with decoder scan 4 x 8 sensor matrix can be interfaced. In this mode, if the control line goes low, the data on return lines, is stored in the FIFO RAM byte by byte. Strobed input mode Right Entry mode displays characters from right to left
- 55. 8279 Commands: 1. Keyboard/Display Mode Set Command (000) used to program operating modes of keyboard and display. Three least significant bits decide the keyboard mode and next two bits decide the display mode Display Keyboard
- 56. 2. Program Clock Command (001) All timing and multiplexing signals are generated by an internal prescaler. prescaler divides the external clock by a programmable integer value to generate internal frequency Bits PPPPP determine the value of this integer which ranges from 2 to 31. internal frequency - 100 kHz 3. Read FIFO/Sensor RAM Command (010): AAA - address of the sensor RAM AI(autoincrement flag) =1, each successive read will be from the subsequent row of the sensor RAM To read data from FIFO/sensor RAM
- 57. 4. Read Display RAM Command (011) To read data from display RAM AI(autoincrement flag) =1, display RAM address is incremented after each read comman AAAA) -address ‘of the 16 byte display RAM 5. Write Display RAM Command AI(autoincrement flag) =1, display RAM address is incremented after each write command to display RAM. AAAA) -address ‘of the 16 byte display RAM
- 58. 6. Display Write Inhibit/Blanking Command (101) display RAM data is sent on the two 4-bit ports (B3 — B0 and A3 —A0) This two 4-bit pots can be individually inhibited or blanked with display write inhibit/blanking(BD) command. IW bits - mask nibble A (4-bit port A) and nibble B (4-bit port B) in applications requiring separate 4-bit display ports. BL bits -blank the individual nibbles. loads the blank code (All zeros, 20H, or All ones) 7. Clear Command (110): clear all the rows of the display RAM with a selectable blanking code, to clear status of FIFO RAM and to reset interrupt output line CD bits (CD0 — CD1 ) are used to select the blanking code
- 59. Bit CD2, - set to 1, to clear display Bit CF, - set to 1 to clears the status of the FIFO, resets the interrupt output line and sets the sensor RAM address to 000. CA, - clear all bit, (combined effect of CD and CF); clears FIFO status. It also resynchronizes the internal timing chain. 8. End Interrupt/Error Mode Set Command (111): In sensor matrix mode, if any change in sensor value is detected, IRQ line goes high at the end of a sensor matrix scan. If the autoincrement flag = 0, IRQ line is cleared. if autoincrement flag =1, End Interrupt Command clear the IRQ line. N key rollover mode, E bit =‘1’, the 8279 will operate in the Special Error Mode.
- 60. Interrupt controller-8259 8086 has only two interrupt inputs, NMI and INTR. If NMI is for a power failure interrupt, then only one interrupt for all the other applications. So external priority interrupt controller is used to handle the interrupts The Intel 8259A Programmable Interrupt Controller handles up to eight vectored priority interrupts for the microprocessor It is cascaded to handle 64 vectored priority interrupts without additional circuitry. It is packaged in a 28-pin DIP, uses NMOS technology, requiring no clock input.
- 61. PIN diagram D0-D7 Bi-directional data lines. read control write control A0 Address line, to select control register chip select CAS0- CAS2 Bi-directional, 3 bit cascade lines. / Slave program / enable. INT Interrupt line, connected to INTR of microprocessor Interrupt ack, received active low from microprocessor IR0-IR7 Asynchronous IRQ input lines, generated by peripherals
- 62. Internal Block diagram of 8259
- 63. IRR stores all the interrupt request to serve them one by one on the priority basis. Interrupt Request Register (IRR): In-Service Register (ISR): This stores all the interrupt requests those are being served Priority resolver Determines the priorities of the bits set in the IRR. IR0 has highest priority IR7 has lowest priority The highest priority is selected and strobed into the corresponding bit of the ISR during INTA pulse Interrupt mask register (IMR) stores the bits required to mask the interrupt inputs based on priority resolver Interrupt Control Logic This block manages the interrupt(INT) and interrupt acknowledge(INTA) signals sent to the microprocessor for serving one of the eight interrupt requests, and release vector address on to the data bus.
- 64. This tristate bidirectional buffer interfaces internal 8259A bus to the microprocessor system data bus. Control words, status and vector information pass through data buffer during read or write operations. Data Bus Buffer This block generates control signals necessary for cascade operations(more than one 8259) Also generate buffer enable signals 8259A can be set up as a master (SP)’/(EN)’ =1) or slave (SP)’/(EN)’ =0) by slave program(SP)’/Enable buffer(EN)’ signal. For a master the CASO-CAS2 pins are output pins and for slave these pins are inputs pins In Master mode , 8259 sends the ID of the interrupting slave device on these lines. The slave thus selected, will send its preprogrammed vector address on the data bus during the next INTA pulse. Read/Write Control Logic Read(RD) and Write(WR) inputs control the data flow on the databus when 8259 is selected by chip select(CP) input. Cascade Buffer/Comparator
- 65. 1. One or more of the INTERRUPT REQUEST lines (IR7 -IR0) are high, corresponding IRR bit(s) is set. 2. 8259A sends an INT to the 8086 and 8086 responds in INTA pulse. 3. Then, the highest priority ISR bit is set, and the corresponding IRR bit is reset. Also release a CALL instruction onto the 8-bit Data Bus (D0 –D7) pins. 4. CALL instruction will initiate two more INTA pulses from 8086 to release the preprogrammed subroutine address onto the Data Bus. Interrupt sequence
- 66. Traffic lights, which may also be known as stoplights, traffic lamps, traffic signals, signal lights, robots or semaphore, are signaling devices positioned at road intersections, pedestrian crossings and other locations to control competing flows of traffic. Traffic light controller INTERFACING TRAFFIC LIGHT WITH 8086 The Traffic light controller section consists of 12 Nos. point led’s arranged by 4Lanes in Traffic light interface card. Each lane has Go(Green), Listen(Yellow) and Stop(Red) LED is being placed.
- 67. REQUEST lines
- 68. Hardware Port A- control lights on N-S road Port B- control lights on W-E road Interfacing diagram to control 12 electric bulbs. electric bulbs are controlled by relays 8255 control the relays by driver circuit Driver circuit consists of 12 transistors. Actual PIN connection
- 69. Find the port address
- 73. LED DISPLAY interfacing Light Emitting Diodes (LED) is the most commonly used components, usually for displaying digital states. Typical uses of LEDs include alarm devices, timers and confirmation of user input such as a mouse click or keystroke. INTERFACING LED Anode is connected through a resistor to GND & the Cathode is connected to the Microprocessor pin. So when the Port Pin is HIGH the LED is OFF & when the Port Pin is LOW the LED is turned ON.
- 74. PIN ASSIGNMENT WITH 8086
- 77. LCD display. LCD modules are available which have built-in drivers for LCD and interfacing circuitry to interface them to microprocessor/microcontroller systems. These LCD modules allow display of characters as well as numbers. They are available in 16 x 2, 20 × 1, 20 × 2, 20 × 4 and 40 × 2 sizes. The main advantage of using LCD is modules is that they require very less power. In this module the display is organized as two lines, each of 20 characters. The module has 14-pins. The voltage at VEE pin is adjusted by a potentiometer to adjust the contrast of the of the LCD. LCD Interfacing:
- 78. LCD pin diagram
- 81. 1.Initialize the 8255 PPI: •Set up the 8255 PPI ports for LCD communication. Port A is used to send data/commands to the LCD, and Port C is used for control signals(RS,R/W and E). •Control Word (80H): Configures Port A and Port C for output. 2. Initialize the LCD: •Send the initialization commands to the LCD: •Set 8-bit mode, 2-line display, and 5x7 character matrix. •Turn on the display, enable the cursor. •Set the entry mode to increment the cursor position after each character. •Clear the display. Procedure for the Code: 3.Display a String: •Load the starting address of the string(1200H)into the source index register(SI). •Use a loop to read each character from memory and send it to the LCD. •After writing a character, move to the next character and repeat until the entire string is displayed.
- 82. 7.Repeat the Process: •After displaying the string, the program jumps back to START and repeats the process indefinitely. 4. CMDWT Subroutine: •Used to send commands to the LCD by writing to the control port (Port C of 8255), setting the RS and E pin accordingly. 5. DATWT Subroutine: •Used to send data (characters) to the LCD by writing to the data port (Port A of 8255) and setting the control signals to indicate data transfer. 6. Delay Subroutine: •Used to introduce a delay between consecutive commands and data writes to ensure the LCD has enough time to process each operation.