

































































![MPI Example: Comm. Around a Ring
int main(argc,argv)
int argc;
char *argv[];
{
int numprocs, rank, next, prev, buf[2], tag1=1, tag2=2;
MPI_Request reqs[4];
MPI_Status stats[4];
MPI_Init(&argc,&argv);
MPI_Comm_size(MPI_COMM_WORLD, &numprocs);
MPI_Comm_rank(MPI_COMM_WORLD, &rank);
prev = rank-1;
next = rank+1;
if (rank == 0) prev = numprocs - 1;
if (rank == (numprocs - 1)) next = 0;
MPI_Irecv(&buf[0], 1, MPI_INT, prev, tag1, MPI_COMM_WORLD, &reqs[0]);
MPI_Irecv(&buf[1], 1, MPI_INT, next, tag2, MPI_COMM_WORLD, &reqs[1]);
MPI_Isend(&rank, 1, MPI_INT, prev, tag2, MPI_COMM_WORLD, &reqs[2]);
MPI_Isend(&rank, 1, MPI_INT, next, tag1, MPI_COMM_WORLD, &reqs[3]);
MPI_Waitall(4, reqs, stats);
MPI_Finalize();
}
73
(c) 2007 Jim Smith](https://image.slidesharecdn.com/lect04-mp-software-250324104313-4f9079a7/85/Parallel-Programming-Models-Shared-variable-model-73-320.jpg)













Parallel Programming Models: Shared variable model
- 1. ECE/CS 757: Advanced Computer Architecture II Instructor:Mikko H Lipasti Spring 2017 University of Wisconsin-Madison Lecture notes based on slides created by John Shen, Mark Hill, David Wood, Guri Sohi, Jim Smith, Natalie Enright Jerger, Michel Dubois, Murali Annavaram, Per Stenström and probably others
- 2. Lecture Outline • Introduction to Parallel Software – Sources of parallelism – Expressing parallelism • Programming Models • Major Abstractions – Processes & threads – Communication – Synchronization • Shared Memory – API description – Implementation at ABI, ISA levels – ISA support • Message Passing – API description – Implementation at ABI, ISA levels – ISA support 2 Mikko Lipasti-University of Wisconsin
- 3. Parallel Software • Why is it so hard? – Conscious mind is inherently sequential – (sub-conscious mind is extremely parallel) • Identifying parallelism in the problem • Expressing parallelism to the hardware • Effectively utilizing parallel hardware – Balancing work – Coordinating work • Debugging parallel algorithms 3 Mikko Lipasti-University of Wisconsin
- 4. Finding Parallelism 1. Functional parallelism – Car: {engine, brakes, entertain, nav, …} – Game: {physics, logic, UI, render, …} – Signal processing: {transform, filter, scaling, …} 2. Automatic extraction – Decompose serial programs 3. Data parallelism – Vector, matrix, db table, pixels, … 4. Request parallelism – Web, shared database, telephony, … 4 Mikko Lipasti-University of Wisconsin
- 5. 1. Functional Parallelism 1. Functional parallelism – Car: {engine, brakes, entertain, nav, …} – Game: {physics, logic, UI, render, …} – Signal processing: {transform, filter, scaling, …} • Relatively easy to identify and utilize • Provides small-scale parallelism – 3x-10x • Balancing stages/functions is difficult 5 Mikko Lipasti-University of Wisconsin
- 6. 2. Automatic Extraction 2. Automatic extraction – Decompose serial programs • Works well for certain application types – Regular control flow and memory accesses • Difficult to guarantee correctness in all cases – Ambiguous memory dependences – Requires speculation, support for recovery • Degree of parallelism – Large (1000x) for easy cases – Small (3x-10x) for difficult cases 6 Mikko Lipasti-University of Wisconsin
- 7. 3. Data Parallelism 3. Data parallelism – Vector, matrix, db table, pixels, web pages,… • Large data => significant parallelism • Many ways to express parallelism – Vector/SIMD – Threads, processes, shared memory – Message-passing • Challenges: – Balancing & coordinating work – Communication vs. computation at scale 7 Mikko Lipasti-University of Wisconsin
- 8. 4. Request Parallelism • Multiple users => significant parallelism • Challenges – Synchronization, communication, balancing work Web Browsing Users Web Server(s) Database Server(s) 8 Mikko Lipasti-University of Wisconsin
- 9. Balancing Work • Amdahl’s parallel phase f: all processors busy • If not perfectly balanced – (1-f) term grows (f not fully parallel) – Performance scaling suffers – Manageable for data & request parallel apps – Very difficult problem for other two: • Functional parallelism • Automatically extracted 9 Mikko Lipasti-University of Wisconsin Time 1 1-f f
- 10. Coordinating Work • Synchronization – Some data somewhere is shared – Coordinate/order updates and reads – Otherwise chaos • Traditionally: locks and mutual exclusion – Hard to get right, even harder to tune for perf. • Research to reality: Transactional Memory – Programmer: Declare potential conflict – Hardware and/or software: speculate & check – Commit or roll back and retry – IBM, Intel, others, now support in HW 10 Mikko Lipasti-University of Wisconsin
- 11. Expressing Parallelism • SIMD – introduced by Cray-1 vector supercomputer – MMX, SSE/SSE2/SSE3/SSE4, AVX at small scale • SPMD or SIMT – GPGPU model (later) – All processors execute same program on disjoint data – Loose synchronization vs. rigid lockstep of SIMD • MIMD – most general (this lecture) – Each processor executes its own program • Expressed through standard interfaces – API, ABI, ISA 11 Mikko Lipasti-University of Wisconsin
- 12. MP Interfaces • Levels of abstraction enable complex system designs (such as MP computers) • Fairly natural extensions of uniprocessor model – Historical evolution H a rd w a re Im p le m e n ta tio n U se r A p p lica tio n s M P IS A M P A B I M P A P I O p e ra tin g S yste m L a n g u a g e /L ib ra rie s R untim e P r o g r a m m i n g M o d e l 12 (c) 2007 Jim Smith
- 13. Programming Models • High level paradigm for expressing an algorithm – Examples: • Functional • Sequential, procedural • Shared memory • Message Passing • Embodied in high level languages that support concurrent execution – Incorporated into HLL constructs – Incorporated as libraries added to existing sequential language • Top level features: – For conventional models – shared memory, message passing – Multiple threads are conceptually visible to programmer – Communication/synchronization are visible to programmer 13 (c) 2007 Jim Smith
- 14. Application Programming Interface (API) • Interface where HLL programmer works • High level language plus libraries – Individual libraries are sometimes referred to as an “API” • User level runtime software is often part of API implementation – Executes procedures – Manages user-level state • Examples: – C and pthreads – FORTRAN and MPI 14 (c) 2007 Jim Smith
- 15. Application Binary Interface (ABI) • Program in API is compiled to ABI • Consists of: – OS call interface – User level instructions (part of ISA) H a rd w a re Im p le m e n ta tio n U se r A p p lica tio n s M P IS A M P A B I M P A P I O p e ra tin g S yste m L a n g u a g e /L ib ra rie s R untim e P r o g r a m m i n g M o d e l 15 (c) 2007 Jim Smith
- 16. Instruction Set Architecture (ISA) • Interface between hardware and software – What the hardware implements • Architected state – Registers – Memory architecture • All instructions – May include parallel (SIMD) operations – Both non-privileged and privileged • Exceptions (traps, interrupts) 16 (c) 2007 Jim Smith
- 17. Programming Model Elements • For both Shared Memory and Message Passing • Processes and threads – Process: A shared address space and one or more threads of control – Thread: A program sequencer and private address space – Task: Less formal term – part of an overall job – Created, terminated, scheduled, etc. • Communication – Passing of data • Synchronization – Communicating control information – To assure reliable, deterministic communication 17 (c) 2007 Jim Smith
- 18. sub-Outline • Shared Memory Model – API-level Processes, Threads – API-level Communication – API-level Synchronization • Shared Memory Implementation – Implementing Processes, Threads at ABI/ISA levels – Implementing Communication at ABI/ISA levels – Implementing Synchronization at ABI/ISA levels In order of decreasing complexity: synchronization, processes&threads, communication • Repeat the above for Message Passing 18 (c) 2007 Jim Smith
- 19. Shared Memory • Flat shared memory or object heap – Synchronization via memory variables enables reliable sharing • Single process • Multiple threads per process – Private memory per thread • Typically built on shared memory hardware system T h re a d 1 P riv ate Va ria b le s T h re a d 1 T h re a d 2 T h rea d N . . . w rite re ad VA R S h a re d V a ria b le s 19 (c) 2007 Jim Smith
- 20. Threads and Processes • Creation – generic -- Fork • (Unix forks a process, not a thread) – pthread_create(….*thread_function….) • creates new thread in current address space • Termination – pthread_exit • or terminates when thread_function terminates – pthread_kill • one thread can kill another 20 (c) 2007 Jim Smith
- 21. Example • Unix process with two threads (PC and stack pointer actually part of ABI/ISA implementation) U se r A ddress S pa ce va r1 va r2 va r3 ... var1 var2 var3 ... thre ad 2 stack thre ad 1 stack text (cod e) m a in() … threa d1() … threa d2() ... da ta structureA arra yB arra yC … hea p thread 1 stack p ointer thread 1 P C thread 2 stack p ointer thread 2 P C 21 (c) 2007 Jim Smith
- 22. Shared Memory Communication • Reads and writes to shared variables via normal language (assignment) statements (e.g. assembly load/store) 22 (c) 2007 Jim Smith
- 23. Shared Memory Synchronization • What really gives shared memory programming its structure • Usually explicit in shared memory model –Through language constructs or API • Three major classes of synchronization –Mutual exclusion (mutex) –Point-to-point synchronization –Rendezvous • Employed by application design patterns –A general description or template for the solution to a commonly recurring software design problem. 23 (c) 2007 Jim Smith
- 24. Mutual Exclusion (mutex) • Assures that only one thread at a time can access a code or data region • Usually done via locks – One thread acquires the lock – All other threads excluded until lock is released • Examples – pthread_mutex_lock – pthread_mutex_unlock • Two main application programming patterns – Code locking – Data locking 24 (c) 2007 Jim Smith
- 25. Code Locking update(args) mutex code_lock; ... lock(code_lock); <read data1> <modify data> <write data2> unlock(code_lock); … return; Data Structure Thread 1 Thread 2 Thread N . . . Thread 1 Thread 2 . . . Thread N • Protect shared data by locking the code that accesses it • Also called a monitor pattern • Example of a critical section 25 (c) 2007 Jim Smith
- 26. Data Locking • Protect shared data by locking data structure lock(struct_lock); <read data1> <modify data> <write data1> unlock(struct_lock); Thread 1 Thread 2 Thread N . . . Thread 1 Thread 2 . . . Thread N lock(struct_lock); <read data2> <read data1> unlock(struct_lock); lock(struct_lock); <read data12> <modify data> <write data2> <write data1> unlock(struct_lock); 26 (c) 2007 Jim Smith
- 27. Data Locking • Preferred when data structures are read/written in combinations • Example: <thread 0> Lock(mutex_struct1) Lock(mutex_struct2) <access struct1> <access struct2> Unlock(mutex_data1) Unlock(mutex_data2) <thread 1> Lock(mutex_struct1) Lock(mutex_struct3) <access struct1> <access struct3> Unlock(mutex_data1) Unlock(mutex_data3) <thread 2> Lock(mutex_struct2) Lock(mutex_struct3) <access struct2> <access struct3> Unlock(mutex_data2) Unlock(mutex_data3) 27 (c) 2007 Jim Smith
- 28. Deadlock • Data locking is prone to deadlock – If locks are acquired in an unsafe order • Example: • Complexity – Disciplined locking order must be maintained, else deadlock – Also, composability problems • Locking structures in a nest of called procedures <thread 0> Lock(mutex_data1) Lock(mutex_data2) <access data1> <access data2> Unlock(mutex_data1) Unlock(mutex_data2) <thread 1> Lock(mutex_data2) Lock(mutex_data1) <access data1> <access data2 Unlock(mutex_data1) Unlock (mutex_data2) 28 (c) 2007 Jim Smith
- 29. Efficiency • Lock Contention – Causes threads to wait • Function of lock granularity – Size of data structure or code that is being locked • Extreme Case: – “One big lock” model for multithreaded OSes – Easy to implement, but very inefficient • Finer granularity + Less contention - More locks, more locking code - perhaps more deadlock opportunities • Coarser granularity – opposite +/- of above 29 (c) 2007 Jim Smith
- 30. Point-to-Point Synchronization • One thread signals another that a condition holds – Can be done via API routines – Can be done via normal load/stores • Examples – pthread_cond_signal – pthread_cond_wait • suspends thread if condition not true • Application program pattern – Producer/Consumer <Producer> <Consumer> while (full ==1){}; wait while (full == 0){}; wait buffer = value; b = buffer; full = 1; full = 0; 30 (c) 2007 Jim Smith
- 31. Rendezvous • Two or more cooperating threads must reach a program point before proceeding • Examples – wait for another thread at a join point before proceeding • example: pthread_join – barrier synchronization • many (or all) threads wait at a given point • Application program pattern – Bulk synchronous programming pattern 31 (c) 2007 Jim Smith
- 32. Bulk Synchronous Program Pattern Thread 1Thread 2 Thread N . . . Barrier Compute Communicate Barrier Compute Communicate Compute 32 (c) 2007 Jim Smith
- 33. Summary: Synchronization and Patterns • mutex (mutual exclusion) – code locking (monitors) – data locking • point to point – producer/consumer • rendezvous – bulk synchronous 33 (c) 2007 Jim Smith
- 34. sub-Outline • Shared Memory Model – API-level Processes, Threads – API-level Communication – API-level Synchronization • Shared Memory Implementation – Implementing Processes, Threads at ABI/ISA levels – Implementing Communication at ABI/ISA levels – Implementing Synchronization at ABI/ISA levels In order of decreasing complexity: synchronization, processes&threads, communication • Repeat the above for Message Passing 34 (c) 2007 Jim Smith
- 35. API Implementation • Implemented at ABI and ISA level – OS calls – Runtime software – Special instructions H a rd w a re Im p le m e n ta tio n U se r A p p lica tio n s M P IS A M P A B I M P A P I O p e ra tin g S yste m L a n g u a g e /L ib ra rie s R untim e P r o g r a m m i n g M o d e l 35 (c) 2007 Jim Smith
- 36. Processes and Threads • Three models – OS processes – OS threads – User threads 36 (c) 2007 Jim Smith
- 37. OS Processes • Thread == Process • Use OS fork to create processes • Use OS calls to set up shared address space (e.g. shmget) • OS manages processes (and threads) via run queue • Heavyweight thread switches – OS call followed by: – Switch address mappings – Switch process-related tables – Full register switch • Advantage – Threads have protected private memory 37 (c) 2007 Jim Smith
- 38. OS (Kernel) Threads • API pthread_create() maps to Linux clone() – Allows multiple threads sharing memory address space • OS manages threads via run queue • Lighter weight thread switch – Still requires OS call – No need to switch address mappings – OS switches architected register state and stack pointer 38 (c) 2007 Jim Smith
- 39. User Threads • If memory mapping doesn’t change, why involve OS at all? • Runtime creates threads simply by allocating stack space • Runtime switches threads via user level instructions – thread switch via jumps U se r A ddress S pa ce va r1 va r2 va r3 ... var1 var2 var3 ... thread 2 sta ck thread 1 sta ck text (code ) m ain () … thread 1() … thread 2() ... data stru cture A arrayB arrayC … hea p thread 1 sta ck pointe r thread 1 P C thread 2 sta ck pointe r thread 2 P C 39 (c) 2007 Jim Smith
- 40. Implementing User Threads • Multiple kernel threads needed to get control of multiple hardware processors • Create kernel threads (OS schedules) • Create user threads that runtime schedules onto kernel threads User Thread Queue Processor 1 Processor 2 Processor N Kernel Threads User Threads Runtime Scheduler Kernel Thread Queue OS Scheduler 40 (c) 2007 Jim Smith
- 41. Implementing User Threads User Thread Queue Processor 1 Processor 2 Processor N Kernel Threads User Threads Runtime Scheduler Kernel Thread Queue OS Scheduler 41 (c) 2007 Jim Smith
- 42. Communication • Easy Just map high level access to variables to ISA level loads and stores • Except for Ordering of memory accesses -- later 42 (c) 2007 Jim Smith
- 43. Synchronization • Implement locks and rendezvous (barriers) • Use loads and stores to implement lock: <thread 0> <thread 1> . . . . LAB1: Load R1, Lock LAB2: Load R1, Lock Branch LAB1 if R1==1 Branch LAB2 if R1==1 Ldi R1, 1 Ldi R1,1 Store Lock, R1 Store Lock, R1 . . <critical section> <critical section> . . Ldi R1, 0 Ldi R1, 0 Store Lock, R1 Store Lock, R1 43 (c) 2007 Jim Smith
- 44. Lock Implementation • Does not work • Violates mutual exclusion if both threads attempt to lock at the same time – In practice, may work most of the time… – Leading to an unexplainable system hang every few days <thread 0> <thread 1> . . . . LAB1: Load R1, Lock LAB2: Load R1, Lock Branch LAB1 if R1==1 Branch LAB2 if R1==1 Ldi R1, 1 Ldi R1,1 Store Lock, R1 Store Lock, R1 44 (c) 2007 Jim Smith
- 45. Lock Implementation • Reliable locking can be done with atomic read-modify-write instruction • Example: test&set – read lock and write a one – some ISAs also set CCs (test) <thread 1> <thread 2> . . LAB1: Test&Set R1, Lock LAB2: Test&Set R1, Lock Branch LAB1 if R1==1 Branch LAB2 if R1==1 . . <critical section> <critical section> . . Reset Lock Reset Lock 45 (c) 2007 Jim Smith
- 46. Atomic Read-Modify-Write • Many such instructions have been used in ISAs • More-or-less equivalent – One can be used to implement the others – Implement Fetch&Add with Test&Set: Test&Set(reg,lock) Fetch&Add(reg,value,sum) Swap(reg,opnd) reg ←mem(lock); reg ← mem(sum); temp←mem(opnd); mem(lock) ← 1; mem(sum)←mem(sum)+value; mem(opnd)← reg; reg ← temp try: Test&Set(lock); if lock == 1 go to try; reg ←mem(sum); mem(sum) ← reg+value; reset (lock); 46 (c) 2007 Jim Smith
- 47. Sub-Atomic Locks • Use two instructions: Load linked + Store conditional – Load linked • reads memory value • sets special flag • writes address to special global address register – Flag cleared on • operations that may violate atomicity – (implementation-dependent) – e.g., write to address by another processor – can use cache coherence mechanisms (later) • context switch – Store conditional • writes value if flag is set • no-op if flag is clear • sets CC indicating or failure 47 (c) 2007 Jim Smith
- 48. Load-Linked Store-Conditional • Example: atomic swap (r4,mem(r1)) try: mov r3,r4 ;move exchange value ll r2,0(r1) ;load locked sc r3,0(r1) ;store conditional beqz r3,try ;if store fails mov r4,r2 ;load value to r4 • RISC- style implementation – Like many early RISC ideas, it seemed like a good idea at the time… register windows, delayed branches, special divide regs, etc. 48 (c) 2007 Jim Smith
- 49. Lock Efficiency • Spin Locks – tight loop until lock is acquired LAB1: Test&Set R1, Lock Branch LAB1 if R1==1 • Inefficiencies: – Memory/Interconnect resources, spinning on read/writes – With a cache-based systems, writes lots of coherence traffic – Processor resource • not executing useful instructions 49 (c) 2007 Jim Smith
- 50. Efficient Lock Implementations • Test&Test&Set – spin on check for unlock only, then try to lock – with cache systems, all reads can be local • no bus or external memory resources used • Test&Set with Backoff – Insert delay between test&set operations (not too long) – Each failed attempt longer delay (Like ethernet collision avoidance) test_it: load reg, mem(lock) branch test_it if reg==1 lock_it: test&set reg, mem(lock) branch test_it if reg==1 50 (c) 2007 Jim Smith
- 51. Efficient Lock Implementations • Solutions just given save memory/interconnect resource –Still waste processor resource • Use runtime to suspend waiting process –Detect lock –Place on wait queue –Schedule another thread from run queue –When lock is released move from wait queue to run queue 51 (c) 2007 Jim Smith
- 52. Point-to-Point Synchronization • Can use normal variables as flags while (full ==1){} ;spin while (full == 0){} ;spin a = value; b = value; full = 1; full = 0; • Assumes sequential consistency (later) – Using normal variables may cause problems with relaxed consistency models • May be better to use special opcodes for flag set/clear 52 (c) 2007 Jim Smith
- 53. Barrier Synchronization • Uses a lock, a counter, and a flag – lock for updating counter – flag indicates all threads have incremented counter Barrier (bar_name, n) { Lock (bar_name.lock); if (bar_name.counter = 0) bar_name.flag = 0; mycount = bar_name.counter++; Unlock (bar_name.lock); if (mycount == n) { bar_name.counter = 0; bar_name.flag = 1; } else while(bar_name.flag = 0) {}; /* busy wait */ } 53 (c) 2007 Jim Smith
- 54. Scalable Barrier Synchronization • Single counter can be point of contention • Solution: use tree of locks • Example: –threads 1,2,3,4,6 have completed lock, counter=2 thread 1 thread 2 lock, counter=2 thread 3 thread 4 lock, counter=1 thread 5 thread 6 lock, counter=0 thread 7 thread 8 lock, counter=2 lock, counter=0 lock, counter=1 flag 54 (c) 2007 Jim Smith
- 55. Memory Ordering • Program Order –Processor executes instructions in architected (PC) sequence or at least appears to • Loads and stores from a single processor execute in program order –Program order must be satisfied –It is part of the ISA • What about ordering of loads and stores from different processors 55 (c) 2007 Jim Smith
- 56. Memory Ordering • Producer/Consumer example: T0: A=0; T1: Flag = 0; .... A=9; While (Flag==0){}; Flag = 1; L2: if (A==0)... • Intuitively it is impossible for A to be 0 at L2 – But it can happen if the updates to memory are reordered by the memory system • In an MP system, memory ordering rules must be carefully defined and maintained 56 (c) 2007 Jim Smith
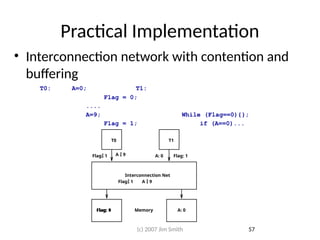
- 57. Practical Implementation • Interconnection network with contention and buffering T0: A=0; T1: Flag = 0; .... A=9; While (Flag==0){}; Flag = 1; if (A==0)... T0 Interconnection Net Memory T1 A 9 A 9 Flag 1 Flag 1 Flag: 0 A: 0 Flag: 1 Flag: 1 A: 0 57 (c) 2007 Jim Smith
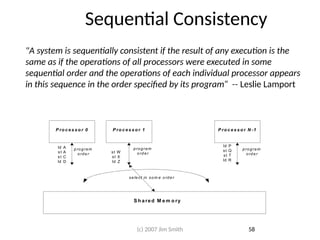
- 58. Sequential Consistency "A system is sequentially consistent if the result of any execution is the same as if the operations of all processors were executed in some sequential order and the operations of each individual processor appears in this sequence in the order specified by its program“ -- Leslie Lamport P ro c e s s o r 0 P ro c e s s o r 1 P ro c e s s o r N -1 S h a re d M e m o ry ld A st A st C ld D st W st X ld Z ld P st Q st T ld R p ro g ra m o rde r prog ram ord er pro gra m o rd e r se le ct in som e o rd e r 58 (c) 2007 Jim Smith
- 59. Memory Coherence • WRT individual memory locations, consistency is always maintained – In producer/consumer examples, coherence is always maintained • Practically, memory coherence often reduces to cache coherence – Cache coherence implementations to be discussed later • Summary – Coherence is for a single memory location – Consistency applies to apparent ordering of all memory locations – Memory coherence and consistency are ISA concepts Thread0: Store A0 Store A9 (a) Thread1: Load A=9 Thread0: Store Flag0 Store Flag1 Thread1: Load Flag=0 Load Flag=0 Load Flag=1 (b) 59 (c) 2007 Jim Smith
- 60. sub-Outline • Message Passing Model – API-level Processes, Threads – API-level Communication – API-level Synchronization • Message Passing Implementation – Implementing Processes, Threads at ABI/ISA levels – Implementing Communication at ABI/ISA levels – Implementing Synchronization at ABI/ISA levels 60 (c) 2007 Jim Smith
- 61. Message Passing • Multiple processes (or threads) • Logical data partitioning – No shared variables • Message Passing – Threads of control communicate by sending and receiving messages – May be implicit in language constructs – More commonly explicit via API P ro c e s s 1 V a ria b le s P ro c e s s 2 V a ria b le s P ro c e s s 1 P ro c e s s 2 P ro c e s s N P ro c e s s N V a ria b le s . . . s e n d re c e iv e 61 (c) 2007 Jim Smith
- 62. MPI –Message Passing Interface API • A widely used standard –For a variety of distributed memory systems • SMP Clusters, workstation clusters, MPPs, heterogeneous systems • Also works on Shared Memory MPs –Easy to emulate distributed memory on shared memory HW • Can be used with a number of high level languages 62 (c) 2007 Jim Smith
- 63. Processes and Threads • Lots of flexibility (advantage of message passing) – 1) Multiple threads sharing an address space – 2) Multiple processes sharing an address space – 3) Multiple processes with different address spaces • and different OSes • 1 and 2 are easily implemented on shared memory hardware (with single OS) – Process and thread creation/management similar to shared memory • 3 probably more common in practice – Process creation often external to execution environment; e.g. shell script – Hard for user process on one system to create process on another OS 63 (c) 2007 Jim Smith
- 64. Process Management • Processes are given identifiers (PIds) –“rank” in MPI • Process can acquire own PId • Operations can be conditional on PId • Message can be sent/received via PIds 64 (c) 2007 Jim Smith
- 65. Process Management • Organize into groups – For collective management and communication P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 MPI_COMM_WORLD P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 Form Group Include in Communicator Form Group Include in Communicator P5 P6 P5 P6 65 (c) 2007 Jim Smith
- 66. Communication and Synchronization • Combined in the message passing paradigm –Synchronization of messages part of communication semantics • Point-to-point communication –From one process to another • Collective communication –Involves groups of processes –e.g., broadcast 66 (c) 2007 Jim Smith
- 67. Point to Point Communication • Use sends/receives • send(RecProc, SendBuf,…) –RecProc is destination (wildcards may be used) –SendBuf names buffer holding message to be sent • receive (SendProc, RecBuf,…) –SendProc names sending process (wildcards may be used) –RecBuf names buffer where message should be placed 67 (c) 2007 Jim Smith
- 68. MPI Examples • MPI_Send(buffer,count,type,dest,tag,comm) buffer – address of data to be sent count – number of data items type – type of data items dest – rank of the receiving process tag – arbitrary programmer-defined identifier tag of send and receive must match comm – communicator number • MPI_Recv(buffer,count,type,source,tag,comm,status) buffer – address of data to be sent count – number of data items type – type of data items source – rank of the sending process; may be a wildcard tag – arbitrary programmer-defined identifier; may be a wildcard tag of send and receive must match comm – communicator number status – indicates source, tag, and number of bytes transferred 68 (c) 2007 Jim Smith
- 69. Message Synchronization • After a send or receive is executed… –Has message actually been sent? or received? • Asynchronous versus Synchronous –Higher level concept • Blocking versus non-Blocking –Lower level – depends on buffer implementation • but is reflected up into the API 69 (c) 2007 Jim Smith
- 70. Synchronous vs Asynchronous • Synchronous Send – Stall until message has actually been received – Implies a message acknowledgement from receiver to sender • Synchronous Receive – Stall until message has actually been received • Asynchronous Send and Receive – Sender and receiver can proceed regardless – Returns request handle that can be tested for message receipt – Request handle can be tested to see if message has been sent/received 70 (c) 2007 Jim Smith
- 71. Asynchronous Send • MPI_Isend(buffer,count,type,dest,tag,comm,request) buffer – address of data to be sent count – number of data items type – type of data items dest – rank of the receiving process tag – arbitrary programmer-defined identifier tag of send and receive must match comm – communicator number request – a unique number that can be used later to test for completion (via Test or Wait) • Sending process is immediately free to do other work • Must test request handle before another message can be safely sent – MPI_test – tests request handle # and returns status – MPI_wait – blocks until request handle# is “done” 71 (c) 2007 Jim Smith
- 72. Asynchronous Receive • MPI_Irecv(buffer,count,type,source,tag,comm,request) buffer – address of data to be sent count – number of data items type – type of data items source – rank of the sending process; may be a wildcard tag – arbitrary programmer-defined identifier; may be a wildcard tag of send and receive must match comm – communicator number request – a unique number that can be used later to test for completion • Receiving process does not wait for message • Must test request handle before message is known to be in buffer – MPI_test – tests request handle # and returns status – MPI_wait – blocks until request handle# is “done” 72 (c) 2007 Jim Smith
- 73. MPI Example: Comm. Around a Ring int main(argc,argv) int argc; char *argv[]; { int numprocs, rank, next, prev, buf[2], tag1=1, tag2=2; MPI_Request reqs[4]; MPI_Status stats[4]; MPI_Init(&argc,&argv); MPI_Comm_size(MPI_COMM_WORLD, &numprocs); MPI_Comm_rank(MPI_COMM_WORLD, &rank); prev = rank-1; next = rank+1; if (rank == 0) prev = numprocs - 1; if (rank == (numprocs - 1)) next = 0; MPI_Irecv(&buf[0], 1, MPI_INT, prev, tag1, MPI_COMM_WORLD, &reqs[0]); MPI_Irecv(&buf[1], 1, MPI_INT, next, tag2, MPI_COMM_WORLD, &reqs[1]); MPI_Isend(&rank, 1, MPI_INT, prev, tag2, MPI_COMM_WORLD, &reqs[2]); MPI_Isend(&rank, 1, MPI_INT, next, tag1, MPI_COMM_WORLD, &reqs[3]); MPI_Waitall(4, reqs, stats); MPI_Finalize(); } 73 (c) 2007 Jim Smith
- 74. Deadlock • Blocking communications may deadlock • Requires careful (safe) ordering of sends/receives • Also depends on buffering – System buffering may not eliminate deadlock, just postpone it <Process 0> <Process 1> Send(Process1, Message); Receive (Process0, Message); Receive(Process1, Message); Send (Process0, Message); <Process 0> <Process 1> Send(Process1, Message); Send(Process0, Message); Receive(Process1, Message); Receive(Process0, Message); 74 (c) 2007 Jim Smith
- 75. Collective Communications • Involve all processes within a communicator • Blocking • MPI_Barrier (comm) – Barrier synchronization • MPI_Bcast (*buffer,count,datatype,root,comm) – Broadcasts from process of rank “root” to all other processes • MPI_Scatter (*sendbuf,sendcnt,sendtype,*recvbuf, ...... recvcnt,recvtype,root,comm) – Sends different messages to each process in a group • MPI_Gather (*sendbuf,sendcnt,sendtype,*recvbuf, ...... recvcount,recvtype,root,comm) – Gathers different messages from each process in a group • Also reductions 75 (c) 2007 Jim Smith
- 76. (c) 2007 Jim Smith 76 Communicators and Groups • Define collections of processes that may communicate – Often specified in message argument – MPI_COMM_WORLD – predefined communicator that contains all processes P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 MPI_COMM_WORLD P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 Form Group Include in Communicator Form Group Include in Communicator P5 P6 P5 P6
- 77. Broadcast Example 98 Process 0 SendBuf 98 Process 0 RcvBuf 98 Process 1 RcvBuf 98 Process 2 RcvBuf 98 Process 3 RcvBuf 77 (c) 2007 Jim Smith
- 78. Scatter Example 55 Process 0 SendBuf 23 Process 0 RcvBuf 37 Process 1 RcvBuf 42 Process 2 RcvBuf 55 Process 3 RcvBuf 42 37 23 78 (c) 2007 Jim Smith
- 79. Gather Example 55 Process 0 RcvBuf 23 Process 0 SendBuf 37 Process 1 SendBuf 42 Process 2 SendBuf 55 Process 3 Sendbuf 42 37 23 79 (c) 2007 Jim Smith
- 80. Message Passing Implementation • At the ABI and ISA level – No special support (beyond that needed for shared memory) – Most of the implementation is in the runtime • user-level libraries – Makes message passing relatively portable • Three implementation models (given earlier) 1) Multiple threads sharing an address space 2) Multiple processes sharing an address space 3) Multiple processes with non-shared address space and different OSes 80 (c) 2007 Jim Smith
- 81. Multiple Threads Sharing Address Space • Runtime manages buffering and tracks communication – Communication via normal loads and stores using shared memory • Example: Send/Receive – Send calls runtime, runtime posts availability of message in runtime- managed table – Receive calls runtime, runtime checks table, finds message – Runtime copies data from send buffer to store buffer via load/stores • Fast/Efficient Implementation – May even be advantageous over shared memory paradigm • considering portability, software engineering aspects – Can use runtime thread scheduling – Problem with protecting private memories and runtime data area 81 (c) 2007 Jim Smith
- 82. Multiple Processes Sharing Address Space • Similar to multiple threads sharing address space • Would rely on kernel scheduling • May offer more memory protection – With intermediate runtime buffering – User processes can not access others’ private memory 82 (c) 2007 Jim Smith
- 83. Multiple Processes with Non-Shared Address Space • Most common implementation • Communicate via networking hardware • Send/receive to runtime – Runtime converts to OS (network) calls • Relatively high overhead – Most HPC systems use special low-latency, high-bandwidth networks – Buffering in receiver’s runtime space may save some overhead for receive (doesn’t require OS call) 83 (c) 2007 Jim Smith
- 84. At the ISA Level: Shared Memory • Multiple processors • Architected shared virtual memory • Architected Synchronization instructions • Architected Cache Coherence • Architected Memory Consistency PC Registers Processor 1 PC Registers Processor 2 PC Registers Processor N Shared Real Memory Cache Memory Interconnection Network Cache Memory Cache Memory Coherent, Consistent Memory System 84 (c) 2007 Jim Smith
- 85. At the ISA Level: Message Passing • Multiple processors • Shared or non-shared real memory (multi-computers) • Limited ISA support (if any) – An advantage of distributed memory systems --Just connect a bunch of small computers – Some implementations may use shared memory managed by runtime PC Registers Processor 1 PC Registers Processor 2 PC Registers Processor N Cache Memory Interconnection Network Cache Memory Cache Memory Private Real Memory Private Real Memory Private Real Memory 85 (c) 2007 Jim Smith
- 86. Lecture Summary • Introduction to Parallel Software • Programming Models • Major Abstractions – Processes & threads – Communication – Synchronization • Shared Memory – API description – Implementation at ABI, ISA levels – ISA support • Message Passing – API description – Implementation at ABI, ISA levels – ISA support • Not covered: openmp, intel tbb, CUDA (later), etc. 86 Mikko Lipasti-University of Wisconsin