![Structured Regression for
Efficient Object Detection
Christoph Lampert
www.christoph-lampert.org
Max Planck Institute for Biological Cybernetics, Tübingen
December 3rd, 2009
• [C.L., Matthew B. Blaschko, Thomas Hofmann. CVPR 2008]
• [Matthew B. Blaschko, C.L. ECCV 2008]
• [C.L., Matthew B. Blaschko, Thomas Hofmann. PAMI 2009]](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-1-320.jpg)











![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 .](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-14-320.jpg)
![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-15-320.jpg)
![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4
Splitting:
• Identify largest interval.](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-16-320.jpg)
![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4
Splitting:
• Identify largest interval. Split at center: R → R1 ∪R2 .](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-17-320.jpg)
![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4
Splitting:
• Identify largest interval. Split at center: R → R1 ∪R2 .
• New box sets: [L, T, R1 , B]](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-18-320.jpg)
![Representing Sets of Boxes
• Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4
Splitting:
• Identify largest interval. Split at center: R → R1 ∪R2 .
• New box sets: [L, T, R1 , B] and [L, T, R2 , B].](https://image.slidesharecdn.com/structuredregressionforefficientobjectdetectionslide-lampert-unknown-2009-110506083248-phpapp01/85/Structured-regression-for-efficient-object-detection-19-320.jpg)











































Structured regression for efficient object detection
- 1. Structured Regression for Efficient Object Detection Christoph Lampert www.christoph-lampert.org Max Planck Institute for Biological Cybernetics, Tübingen December 3rd, 2009 • [C.L., Matthew B. Blaschko, Thomas Hofmann. CVPR 2008] • [Matthew B. Blaschko, C.L. ECCV 2008] • [C.L., Matthew B. Blaschko, Thomas Hofmann. PAMI 2009]
- 3. Category-Level Object Localization What objects are present? person, car
- 4. Category-Level Object Localization Where are the objects?
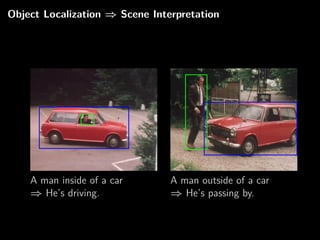
- 5. Object Localization ⇒ Scene Interpretation A man inside of a car A man outside of a car ⇒ He’s driving. ⇒ He’s passing by.
- 6. Algorithmic Approach: Sliding Window f (y1 ) = 0.2 f (y2 ) = 0.8 f (y3 ) = 1.5 Use a (pre-trained) classifier function f : • Place candidate window on the image. • Iterate: Evaluate f and store result. Shift candidate window by k pixels. • Return position where f was largest.
- 7. Algorithmic approach: Sliding Window f (y1 ) = 0.2 f (y2 ) = 0.8 f (y3 ) = 1.5 Drawbacks: • single scale, single aspect ratio → repeat with different window sizes/shapes • search on grid → speed–accuracy tradeoff • computationally expensive
- 8. New view: Generalized Sliding Window Assumptions: • Objects are rectangular image regions of arbitrary size. • The score of f is largest at the correct object position. Mathematical Formulation: yopt = argmax f (y) y∈Y with Y = {all rectangular regions in image}
- 9. New view: Generalized Sliding Window Mathematical Formulation: yopt = argmax f (y) y∈Y with Y = {all rectangular regions in image} • How to choose/construct/learn the function f ? • How to do the optimization efficiently and robustly? (exhaustive search is too slow, O(w2 h2 ) elements).
- 10. New view: Generalized Sliding Window Mathematical Formulation: yopt = argmax f (y) y∈Y with Y = {all rectangular regions in image} • How to choose/construct/learn the function f ? • How to do the optimization efficiently and robustly? (exhaustive search is too slow, O(w2 h2 ) elements).
- 11. New view: Generalized Sliding Window Use the problem’s geometric structure:
- 12. New view: Generalized Sliding Window Use the problem’s geometric structure: • Calculate scores for sets of boxes jointly. • If no element can contain the maximum, discard the box set. • Otherwise, split the box set and iterate. → Branch-and-bound optimization • finds global maximum yopt
- 13. New view: Generalized Sliding Window Use the problem’s geometric structure: • Calculate scores for sets of boxes jointly. • If no element can contain the maximum, discard the box set. • Otherwise, split the box set and iterate. → Branch-and-bound optimization • finds global maximum yopt
- 14. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 .
- 15. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4
- 16. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4 Splitting: • Identify largest interval.
- 17. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4 Splitting: • Identify largest interval. Split at center: R → R1 ∪R2 .
- 18. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4 Splitting: • Identify largest interval. Split at center: R → R1 ∪R2 . • New box sets: [L, T, R1 , B]
- 19. Representing Sets of Boxes • Boxes: [l, t, r, b] ∈ R4 . Boxsets: [L, T, R, B] ∈ (R2 )4 Splitting: • Identify largest interval. Split at center: R → R1 ∪R2 . • New box sets: [L, T, R1 , B] and [L, T, R2 , B].
- 20. Calculating Scores for Box Sets Example: Linear Support-Vector-Machine f (y) := pi ∈y wi . + f upper (Y) = min(0, wi ) + max(0, wi ) pi ∈y∩ pi ∈y∪ Can be computed in O(1) using integral images.
- 21. Calculating Scores for Box Sets J y Histogram Intersection Similarity: f (y) := j=1 min(hj , hj ). J ∪ y f upper (Y) = j=1 min(hj , hj ) As fast as for a single box: O(J) with integral histograms.
- 22. Evaluation: Speed (on PASCAL VOC 2006) Sliding Window Runtime: • always: O(w2 h2 ) Branch-and-Bound (ESS) Runtime: • worst-case: O(w2 h2 ) • empirical: not more than O(wh)
- 23. Extensions: Action classification: (y, t)opt = argmax(y,t)∈Y×T fx (y, t) • J. Yuan: Discriminative 3D Subvolume Search for Efficient Action Detection, CVPR 2009.
- 24. Extensions: Localized image retrieval: (x, y)opt = argmaxy∈Y, x∈D fx (y) • C.L.: Detecting Objects in Large Image Collections and Videos by Efficient Subimage Retrieval, ICCV 2009
- 25. Extensions: Hybrid – Branch-and-Bound with Implicit Shape Model • A. Lehmann, B. Leibe, L. van Gool: Feature-Centric Efficient Subwindow Search, ICCV 2009
- 27. Generalized Sliding Window yopt = argmax f (y) y∈Y with Y = {all rectangular regions in image} • How to choose/construct/learn f ? • How to do the optimization efficiently and robustly?
- 28. Traditional Approach: Binary Classifier Training images: + + • x1 , . . . , xn show the object − − • x1 , . . . , xm show something else Train a classifier, e.g. • support vector machine, • boosted cascade, • artificial neural network,. . . Decision function f : {images} → R • f > 0 means “image shows the object.” • f < 0 means “image does not show the object.”
- 29. Traditional Approach: Binary Classifier Drawbacks: • Train distribution = test distribution • No control over partial detections. • No guarantee to even find training examples again.
- 30. Object Localization as Structured Output Regression Ideal setup: • function g : {all images} → {all boxes} to predict object boxes from images • train and test in the same way, end-to-end gcar =
- 31. Object Localization as Structured Output Regression Ideal setup: • function g : {all images} → {all boxes} to predict object boxes from images • train and test in the same way, end-to-end Regression problem: • training examples (x1 , y1 ), . . . , (xn , yn ) ∈ X × Y xi are images, yi are bounding boxes • Learn a mapping g : X →Y that generalizes from the given examples: g(xi ) ≈ yi , for i = 1, . . . , n,
- 32. Structured Support Vector Machine SVM-like framework by Tsochantaridis et al.: • Positive definite kernel k : (X × Y) × (X × Y)→R. ϕ : X × Y → H : (implicit) feature map induced by k. • ∆ : Y × Y → R: loss function • Solve the convex optimization problem n 1 2 minw,ξ w +C ξi 2 i=1 subject to margin constraints for i = 1, . . . , n : ∀y ∈ Y {yi } : ∆(y, yi ) + w, ϕ(xi , y) − w, ϕ(xi , yi ) ≤ ξi , • unique solution: w ∗ ∈ H • I. Tsochantaridis, T. Joachims, T. Hofmann, Y. Altun: Large Margin Methods for Structured and Interdependent Output Variables, Journal of Machine Learning Research (JMLR), 2005.
- 33. Structured Support Vector Machine • w ∗ defines compatiblity function F (x, y) = w ∗ , ϕ(x, y) • best prediction for x is the most compatible y: g(x) := argmax F (x, y). y∈Y • evaluating g : X → Y is like generalized Sliding Window: for fixed x, evaluate quality function for every box y ∈ Y. for example, use previous branch-and-bound procedure!
- 34. Joint Image/Box-Kernel: Example Joint kernel: how to compare one (image,box)-pair (x, y) with another (image,box)-pair (x , y )? kjoint , =k , is large. kjoint , =k , is small. kjoint , = kimage , could also be large.
- 35. Loss Function: Example Loss function: how to compare two boxes y and y ? ∆(y, y ) := 1 − area overlap between y and y area(y ∩ y ) =1− area(y ∪ y )
- 36. Structured Support Vector Machine n 1 2 • S-SVM Optimization: minw,ξ 2 w +C ξi i=1 subject to for i = 1, . . . , n : ∀y ∈ Y {yi } : ∆(y, yi ) + w, ϕ(xi , y) − w, ϕ(xi , yi ) ≤ ξi ,
- 37. Structured Support Vector Machine n 1 2 • S-SVM Optimization: minw,ξ 2 w +C ξi i=1 subject to for i = 1, . . . , n : ∀y ∈ Y {yi } : ∆(y, yi ) + w, ϕ(xi , y) − w, ϕ(xi , yi ) ≤ ξi , • Solve via constraint generation: • Iterate: Solve minimization with working set of contraints Identify argmaxy∈Y ∆(y, yi ) + w, ϕ(xi , y) Add violated constraints to working set and iterate • Polynomial time convergence to any precision ε • Similar to bootstrap training, but with a margin.
- 38. Evaluation: PASCAL VOC 2006 Example detections for VOC 2006 bicycle, bus and cat. Precision–recall curves for VOC 2006 bicycle, bus and cat. • Structured regression improves detection accuracy. • New best scores (at that time) in 6 of 10 classes.
- 39. Why does it work? Learned weights from binary (center) and structured training (right). • Both methods assign positive weights to object region. • Structured training also assigns negative weights to features surrounding the bounding box position. • Posterior distribution over box coordinates becomes more peaked.
- 40. More Recent Results (PASCAL VOC 2009) aeroplane
- 41. More Recent Results (PASCAL VOC 2009) bicycle
- 42. More Recent Results (PASCAL VOC 2009) bird
- 43. More Recent Results (PASCAL VOC 2009) boat
- 44. More Recent Results (PASCAL VOC 2009) bottle
- 45. More Recent Results (PASCAL VOC 2009) bus
- 46. More Recent Results (PASCAL VOC 2009) car
- 47. More Recent Results (PASCAL VOC 2009) cat
- 48. More Recent Results (PASCAL VOC 2009) chair
- 49. More Recent Results (PASCAL VOC 2009) cow
- 50. More Recent Results (PASCAL VOC 2009) diningtable
- 51. More Recent Results (PASCAL VOC 2009) dog
- 52. More Recent Results (PASCAL VOC 2009) horse
- 53. More Recent Results (PASCAL VOC 2009) motorbike
- 54. More Recent Results (PASCAL VOC 2009) person
- 55. More Recent Results (PASCAL VOC 2009) pottedplant
- 56. More Recent Results (PASCAL VOC 2009) sheep
- 57. More Recent Results (PASCAL VOC 2009) sofa
- 58. More Recent Results (PASCAL VOC 2009) train
- 59. More Recent Results (PASCAL VOC 2009) tvmonitor
- 60. Extensions: Image segmentation with connectedness constraint: CRF segmentation connected CRF segmentation • S. Nowozin, C.L.: Global Connectivity Potentials for Random Field Models, CVPR 2009.
- 61. Summary Object Localization is a step towards image interpretation. Conceptual approach instead of algorithmic: • Branch-and-bound evaluation: don’t slide a window, but solve an argmax problem, ⇒ higher efficiency • Structured regression training: solve the prediction problem, not a classification proxy. ⇒ higher localization accuracy • Modular and kernelized: easily adapted to other problems/representations, e.g. image segmentations