



















Types of Load distributing algorithm in Distributed System
- 2. Load on a system/node can correspond to the queue length of tasks/ processes that need to be processed. Queue length of waiting tasks: proportional to task response time, hence a good indicator of system load. Distributing load: transfer tasks/processes among nodes. If a task transfer (from another node) takes a long time, the node may accept more tasks during the transfer time. Causes the node to be highly loaded. Affects performance. Solution: artificially increment the queue length when a task is accepted for transfer from remote node (to account for the proposed increased in load). Task transfer can fail? : use timeouts.
- 3. Static load distribution algorithms: Decisions are hard-coded into an algorithm with a priori knowledge of system. Dynamic load distribution: use system state information such as task queue length, processor utilization. Adaptive load distribution: adapt the approach based on system state. (e.g.,) Dynamic distribution algorithms collect load information from nodes even at very high system loads. Load information collection itself can add load on the system as messages need to be exchanged. Adaptive distribution algorithms may stop collecting state information at high loads.
- 4. Load balancing: Equalize load on the participating nodes. Transfer tasks even if a node is not heavily loaded so that queue lengths on all nodes are approximately equal. More number of task transfers, might degrade performance. Load sharing: Reduce burden of an overloaded node. Transfer tasks only when the queue length exceeds a certain threshold. Less number of task transfers. Anticipatory task transfers: transfer from overloaded nodes to ones that are likely to become idle/lightly loaded. More like load balancing, but may be less number of transfers.
- 5. Preemptive task transfers: transfer tasks that are partially executed. Expensive as it involves collection of task states. Task state: virtual memory image, process control block, IO buffers, file pointers, timers, ... Non-preemptive task transfers: transfer tasks that have not begun execution. Do not require transfer of task states. Can be considered as task placements. Suitable for load sharing not for load balancing. Both transfers involve information on user’s current working directory, task privileges/priority.
- 6. Transfer policy: to decide whether a node needs to transfer tasks. Thresholds, perhaps in terms of number of tasks, are generally used. (Another threshold can be processor utilization). When a load on a node exceeds a threshold T, the node becomes a sender. When it falls below a threshold, it becomes a receiver. Selection Policy: to decide which task is to be transferred. Criteria: task transfer should lead to reduced response time, i.e., transfer overhead should be worth incurring. Simplest approach: select newly originated tasks. Transfer costs lower as no state information is to be transferred. Non- preemptive transfers. Other factors for selection: smaller tasks have less overhead. Location-dependent system calls minimal (else, messages need to be exchanged to perform system calls at the original node).
- 7. Location Policy: to decide the receiving node for a task. Polling is generally used. A node polls/checks whether another is suitable and willing. Polling can be done serially or in parallel (using multicast). Alternative: broadcasting a query, sort of invitation to share load. Information policy: for collecting system state information. The collected information is used by transfer, selection, and location. Demand-driven Collection: Only when a node is highly or lightly loaded, i.e., when a node becomes a potential sender or receiver. Can be sender-initiated, receiver-initiated, or both(symmetric). Periodic: May not be adaptive. Collection may be done at high loads worsening system performance. State-change driven: only when state changes by a certain degree.
- 8. Unstable system: long term arrival rate of work to a system is greater than the CPU power. Load sharing/balancing algorithm may add to the system load making it unstable. (e.g.,) load information collection at high system loads. Effectiveness of algorithm: Effective if it improves the performance relative to that of a system not using it. (Effective algorithm cannot be unstable). Load balancing algorithms should avoid fruitless actions. (e.g.,) processor thrashing: task transfer makes the receiver highly loaded, so the task gets transferred again, perhaps repeatedly.
- 9. Sender-initiated: distribution initiated by an overloaded node. Receiver-initiated: distribution initiated by lightly loaded nodes. Symmetric: initiated by both senders and receivers. Has advantages and disadvantages of both the approaches. Adaptive: sensitive to state of the system.
- 10. Transfer Policy: Use thresholds. Sender if queue length exceeds T. Receiver if accepting a task will not make queue length exceed T. Selection Policy: Only newly arrived tasks. Location Policy: Random: Use no remote state information. Task transferred to a node at random. No need for state collection. Unnecessary task transfers (processor thrashing) may occur. Threshold: poll a node to find out if it is a receiver. Receiver must accept the task irrespective of when it (task) actually arrives. PollLimit, ie., the number of polls, can be used to reduce overhead. Shortest: Poll a set of nodes. Select the receiver with shortest task queue length.
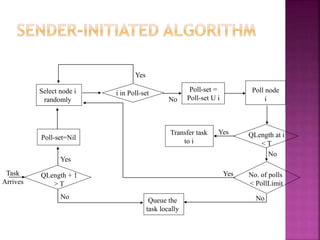
- 11. QLength + 1 > T Poll-set=Nil Select node i randomly i in Poll-set Poll-set = Poll-set U i Poll node i QLength at i < T Transfer task to i No. of polls < PollLimit Queue the task locally Task Arrives Yes No Yes No Yes No No Yes
- 12. Information Policy: demand-driven. Stability: can become unstable at high loads. At high loads, it may become difficult for senders to find receivers. Also, the number of senders increase at high system loads thereby increasing the polling activity. Polling activity may make the system unstable at high loads.
- 13. Transfer Policy: uses thresholds. Queue lengths below T identifies receivers and those above T identifies senders. Selection Policy: as before. Location Policy: Polling. A random node is polled to check if a task transfer would place its queue length below a threshold. If not, the polled node transfers a task. Otherwise, poll another node till a static PollLimit is reached. If all polls fail, wait until another task is completed before starting polling operation. Information policy: demand-driven. Stability: Not unstable since there are lightly loaded systems that have initiated the algorithm.
- 14. QLength < T Poll-set=Nil Select node i randomly i in Poll-set Poll-set = Poll-set U i Poll node i QLength at i > T Transfer task from i No. of polls < PollLimit Wait for some time Task Departs Yes Yes No Yes No No Yes
- 15. Drawback: Polling initiated by receiver implies that it is difficult to find senders with new tasks. Reason: systems try to schedule tasks as and when they arrive. Effect: receiver-initiated approach might result in preemptive transfers. Hence transfer costs are more. Sender-initiated: transfer costs are low as new jobs are transferred and so no need for transferring task states.
- 16. Senders search for receivers and vice-versa. Low loads: senders can find receivers easily. High loads: receivers can find senders easily. May have disadvantages of both: polling at high loads can make the system unstable. Receiver-initiated task transfers can be preemptive and so expensive. Simple algorithm: combine previous two approaches. Above-average algorithm: Transfer Policy: Two adaptive thresholds instead of one. If a node’s estimated average load is A, a higher threshold TooHigh > A and a lower threshold TooLow < A are used. Load < TooLow -> receiver. Load > TooHigh -> sender.
- 17. Location policy: Sender Component Node with TooHigh load, broadcasts a TooHigh message, sets TooHigh timer, and listens for an Accept message. A receiver that gets the (TooHigh) message sends an Accept message, increases its load, and sets AwaitingTask timer. If the AwaitingTask timer expires, load is decremented. On receiving the Accept message: if the node is still a sender, it chooses the best task to transfer and transfers it to the node. When sender is waiting for Accept, it may receive a TooLow message (receiver initiated). Sender sends TooHigh to that receiver. Do step 2 & 3. On expiration of TooHigh timer, if no Accept message is received, system is highly loaded. Sender broadcasts a ChangeAverage message.
- 18. Receiver Component Node with TooLow load, broadcasts a TooLow message, sets a TooLow timer, and listens for TooHigh message. If TooHigh message is received, do step 2 & 3 in Sender Component. If TooLow timer expires before receiving any TooHigh message, receiver broadcasts a ChangeAverage message to decrease the load estimate at other nodes. Selection Policy: as discussed before. Information policy: demand driven. Average load is modified based on system load. High loads may have less number of senders progressively. Average system load is determined individually. There is a range of acceptable load before trying to be a sender or a receiver.
- 19. Limit Sender’s polling actions at high load to avoid instability. Utilize the collected state information during previous polling operations to classify nodes as: Sender/overloaded, receiver/underloaded, OK (in acceptable load range). Maintained as separate lists for each class. Initially, each node assumes that all others are receivers. Location policy at sender: Sender polls the head of the receiver list. Polled node puts the sender at the head of it sender list. It informs the sender whether it is a receiver, a sender, or a OK node. If the polled node is still a receiver, the new task is transferred. Else the sender updates the polled node’s status, polls the next potential receiver. If this polling process fails to identify a receiver, the task can still be transferred during a receiver-initiated dialogue.
- 20. Location policy at receiver Receivers obtain tasks from potential senders. Lists are scanned in the following order. Head to tail in senders list (most up-to-date info used), tail to head in OK list (least up-to-date used), tail to head in receiver list. Least up-to-date used in the hope that status might have changed. Receiver polls the selected node. If the node is a sender, a task is transferred. If the node is not a sender, both the polled node and receiver update each other’s status. Polling process stops if a sender is found or a static PollLimit is reached.
- 21. At high loads, sender-initiated polling gradually reduces as nodes get removed from receiver list (and become senders). Whereas at low loads, sender will generally find some receiver. At high loads, receiver-initiated works and can find a sender. At low loads, receiver may not find senders, but that does not affect the performance. Algorithm dynamically becomes sender-initiated at low loads and receiver-initiated at high loads. Hence, algorithm is stable and can use non-preemptive transfers at low loads (sender initiated).